
【医療監修】正しい歩き方とは?足指から始まる姿勢と歩行の本当の仕組み
.054-scaled.jpeg)
はじめに
こんにちは。足指研究家の湯浅慶朗です。
私はこれまで 10 万人以上の足・歩行・姿勢を観察し、東京大学との共同研究を通して、
「下半身の使い方ひとつで姿勢も上半身も変わる」
という事実を数えきれないほど目にしてきました。
私はこの「姿勢は末端(足元)から中枢へ積み上がる」という構造を、
Hand-Standing理論として整理しています。
手で逆立ちをするとき、指が使えなければ身体を支えられないのと同じように、
足でもまた、足指と歩行の質が姿勢制御の起点になります。
その中でも、もっとも再現性が高く、多くの人に“姿勢が整いやすい傾向”が見られた歩き方があります。
それが、私が体系化した YOSHIRO WALK(小股歩き) です。
この歩き方は、一般的にイメージされる「チョコチョコ歩く小股歩き」とは全く違います。
歩幅、速度、足指の動きを最適化することで、
足首 → ふくらはぎ → 太もも → 骨盤 → 背骨 → 体幹 → 肩
というように、下から順に筋肉と関節がゆるみながら、姿勢が整いやすい流れをつくる歩行法です。
そしてこの方法は、近年の歩行研究(歩幅・歩行速度・安定性)とも一致しています。
以下、その詳細をお話しします。
■ なぜ“小股歩き”が姿勢に良いのか?
—— 世界の歩行研究で明らかになってきた「歩幅・歩行速度と安定性」の関係
歩幅(ストライド長)と歩行速度は、歩行の安定性に深く関わっています。
オレゴン州立大学の研究では、歩行速度と安定性は「U字型」の関係にあり、速すぎても遅すぎても横方向の揺れが大きくなり、適度なゆっくり速度での歩行がもっとも安定しやすいことが報告されています(Fallahtafti et al., 2021)。
アムステルダム自由大学の Hak ら(2013)は、歩幅・歩行速度・歩行ピッチを操作して歩行を分析し、ストライド長を短くする(=小股にする)ことは後方方向の安定性を高め、ストライド頻度を適度に上げることは左右方向の安定性を高めると報告しています(Hak et al., 2013, PLoS ONE)。
この結果は、YOSHIRO WALKの「自然な小さめ歩幅」「ゆっくりめ速度」が、
身体バランスを崩さずに歩けることを裏付けています。
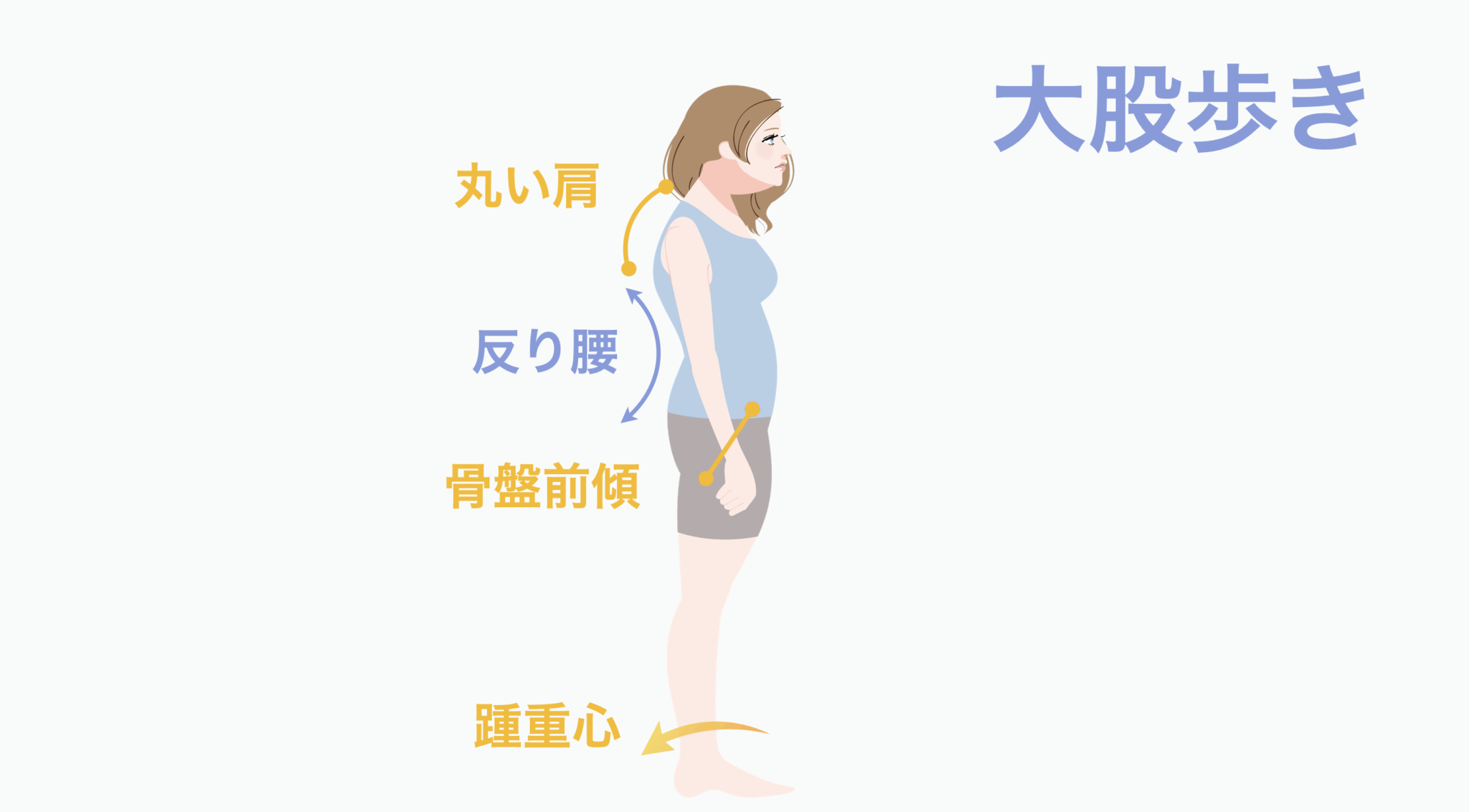
● ※ここが重要
歩幅が大きいと
→ 体が前に倒れすぎる
→ 足指が丸まりやすい
→ ふくらはぎが固まる
→ 骨盤が前に引っ張られる
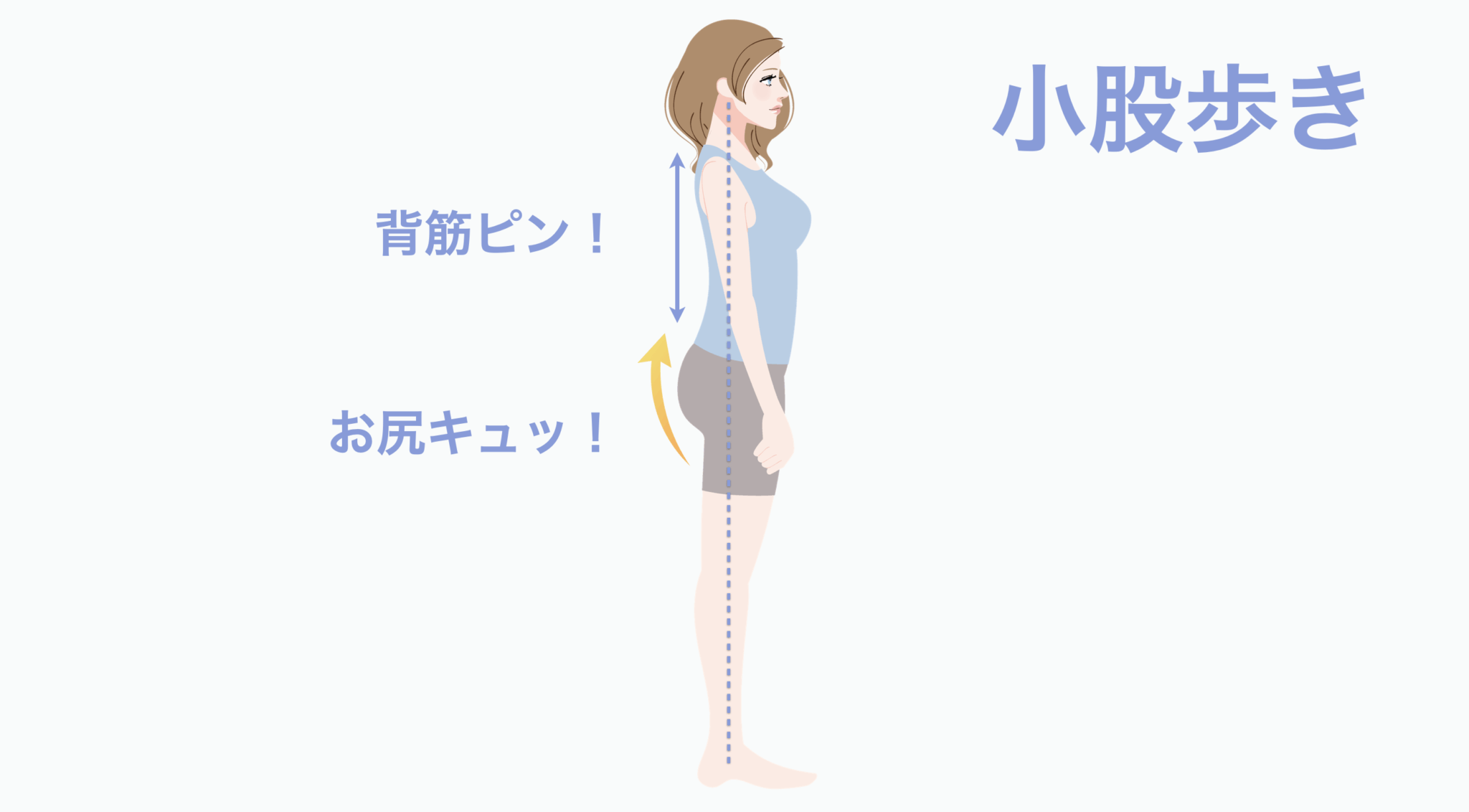
歩幅が自然な範囲(小さめ)になると
→ 足指が地面を押し出しやすい
→ ふくらはぎが伸び縮みしやすい
→ ハムストリングスがゆるむ
→ 骨盤が立ちやすい
→ 体幹が安定し、結果として首や肩の力みが抜けやすい
歩幅と身体のゆるみには 明確な因果構造 があるのです。
■ 後ろ向きに歩いて歩幅を探る理由
—— 身体が“自然に選ぶ歩幅”が、あなたにとって最適

後ろ向きに歩くと、人間は無意識に
「転ばない歩幅」=機能的に最適な歩幅
を選びます。
私が臨床で見てきた結果では、多くの人が
「足の長さ+少し長め」ほどの自然な歩幅
に落ち着きます。
この歩幅は、上の Hak らの研究が示す 安定性が高い歩幅 と非常に近い。
YOSHIRO WALKで最初に後ろ歩きを行うのは、
あなたに最適な歩幅を身体自身に選ばせるため です。
ゆっくり歩行が身体を整えやすい理由
—— 速度を落とすと、筋肉と関節の“滑走”が改善しやすい
多くの歩行研究でも、歩行速度を落とすことで
- 足関節の背屈
- 下腿三頭筋(ふくらはぎ)の伸張
- 股関節の伸展
- 体幹の揺れの減少
などが起こり、関節可動域の改善につながりやすい傾向 が示されています。
Kang ら(2008, Journal of Biomechanics)は、歩行速度と下肢関節の可動域(ROM)を分析し、速度を落とした歩行では足関節背屈・下腿三頭筋の伸張・股関節伸展などの関節可動域が自然と大きくなり、体幹の過剰な揺れが減少する傾向があると報告しています。
速度を落とすと、
「押す」「蹴る」の感覚が戻る
ここが非常に重要です。
→ 足指が地面をつかむ前に地面から離れる
→ 足指が働かない
→ ふくらはぎ・太もも・骨盤が“固め動作”になる
→ 姿勢が崩れやすい
→ 足指が前にスッと伸びる
→ 前足部で地面を押せる
→ 足首が上下に大きく動く
→ ふくらはぎ〜ハムストリングが柔らかくなる
→ 骨盤がしなやかに動き出す
「下から順にゆるむ=上行性メカニズム」 です。
かかと着地を“意識しない”ほうが良い理由
—— 意識すると逆に足首を固めるから
「しっかりかかとから着地しろ」と言われた時代が長く続きましたが、
これは足元の緊張を高め、
足指のセンサー(足底の感覚受容器)を働きにくくします。
ストライド長を短くすると安定性が増す、という研究とも一致しており、
自然な歩幅+自然な着地 が最も機能的です。
かかとで着くかどうかではなく、
- 足裏全体が“勝手に”地面に入る
- 押し出しで進む
という感覚が正解です。
地面を押し出すように蹴る
—— 足指を“軽く”伸ばすと上半身まで連鎖する
ここがYOSHIRO WALK最大のポイントです。
足指を「広げよう」「伸ばそう」と力を入れる必要はありません。
軽く伸びている 程度の無意識レベルで十分。
この時に起こる連鎖は、臨床上極めて再現性があります。
● 上行性メカニズム
- 足首の背屈・底屈が大きくなる
- ふくらはぎ(下腿三頭筋)が伸び縮みしやすくなる
- ハムストリングスがゆるむ
- 骨盤の動きがしなやかになる
- 体幹が固まらずに働きやすくなる
- 肩・首の力が抜け、姿勢が整いやすくなる
この流れが、ゆっくり歩行+適切な歩幅で最大限引き出されます。
練習は砂場や砂浜がベスト
—— アスファルトでは“滑らないよう踏ん張る癖”が出る
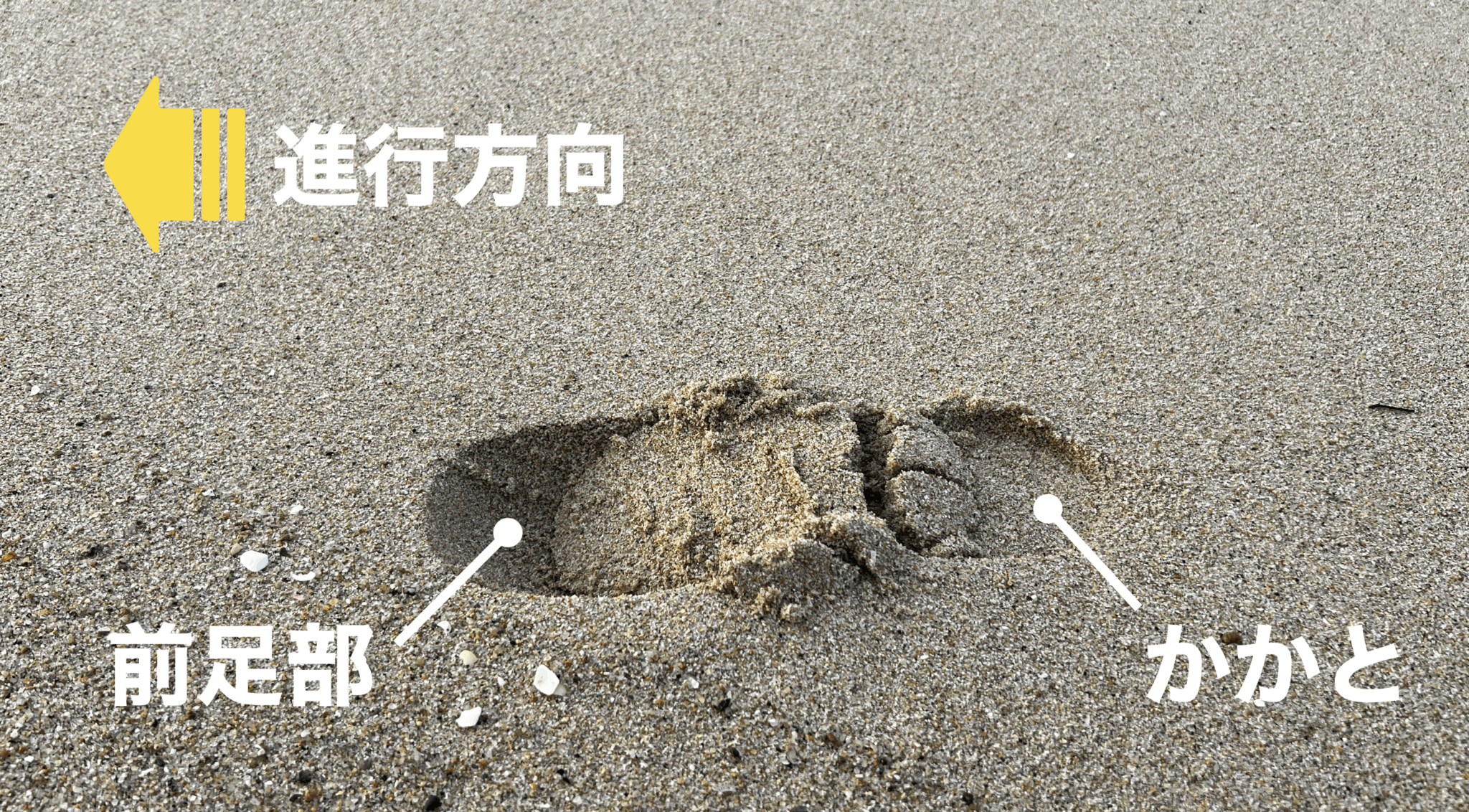
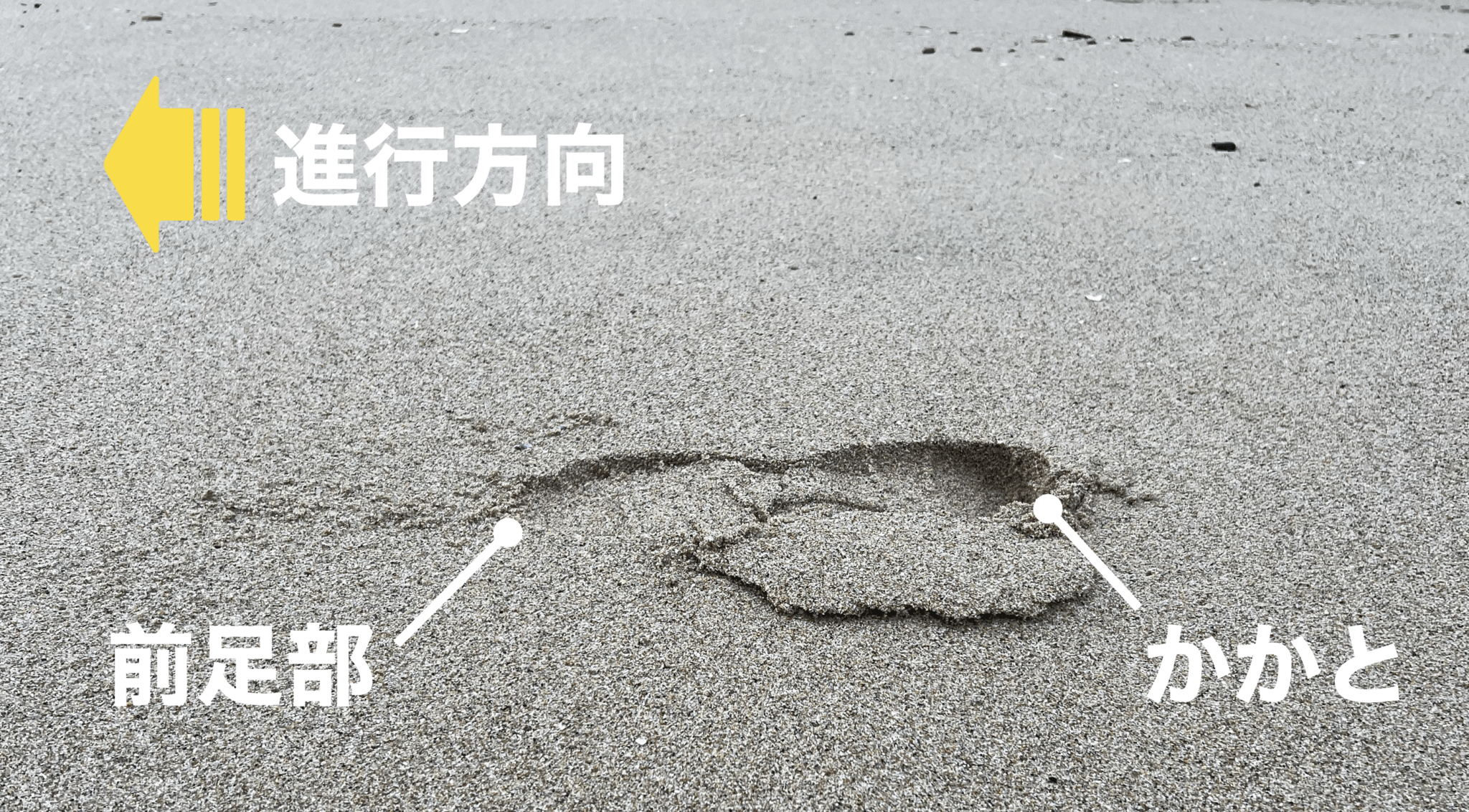
砂地は、足指の押し出しが正しくできていれば
前足部だけが深くえぐれる跡
になります。
- かかとの跡が浅い
- 前足部がしっかりえぐれている
これは 「足指→足首→ふくらはぎ」が正しく働いている証拠 です。
1日5〜10分 × 3ヶ月 —— “歩き始めだけ”で身体が学習する
YOSHIRO WALKは一日中続ける必要はありません。
最初の5〜10分だけ意識して歩く
これだけで、身体は自然に歩き方を覚えていきます。
3ヶ月後には、意識をせずとも
「自然に押し出す歩き方」を身体が再現しやすくなります。
まとめ —— 小股歩きは歩行研究とも一致する、“姿勢につながる歩き方”
- 歩幅は「後ろ向きの自然歩幅」=安定性が高い(Hak 2013)
- ゆっくり歩行は“押し出し”の動きを取り戻しやすい
- 足指が軽く働くと、ふくらはぎ→骨盤→体幹へ連鎖が起こる
- 姿勢を整えたい人ほど、歩き方の再教育が必要
- 特別な道具は不要。1日5〜10分の反復で自然に身につく
YOSHIRO WALKは、足指研究所での観察研究と、世界の歩行学の知見を統合する歩行法です。
誰でも今日からできるセルフケア
まずは、足指を「動かせる状態」に戻すこと。
ここはとても大切です。
やるのとやらないのとでは、
この先の身体の使い方に大きな差が出ます。
そのために、私が最初にお伝えしているのが
足の指を広げて伸ばす「ひろのば体操」です。
足指を広げて伸ばすことで、
本来の使い方を思い出してもらうための
とてもシンプルな体操です。
分かってるけど、続かない。
ひろのば体操は
- 痩せたい人
- 正座をしたい人
- 歩きやすくしたい人
- 姿勢を整えたい人
できれば多くの人に続けてほしい体操です。
でも実際には
「分かっているけど続かない」
という声も多く聞きます。
だからこそ、体操で行っている
「足指を広げて伸ばす環境」を
日常でもサポートできるように設計したのが
YOSHIRO SOCKSです。

正しい靴選び・履き方
ひろのば体操やYOSHIRO SOCKSで
足指が動きやすくなっても、
履く靴や履き方によっては
足指がまた使えなくなってしまいます。
そのため私は
- 靴の選び方
- 靴の履き方
もあわせてお伝えしています。
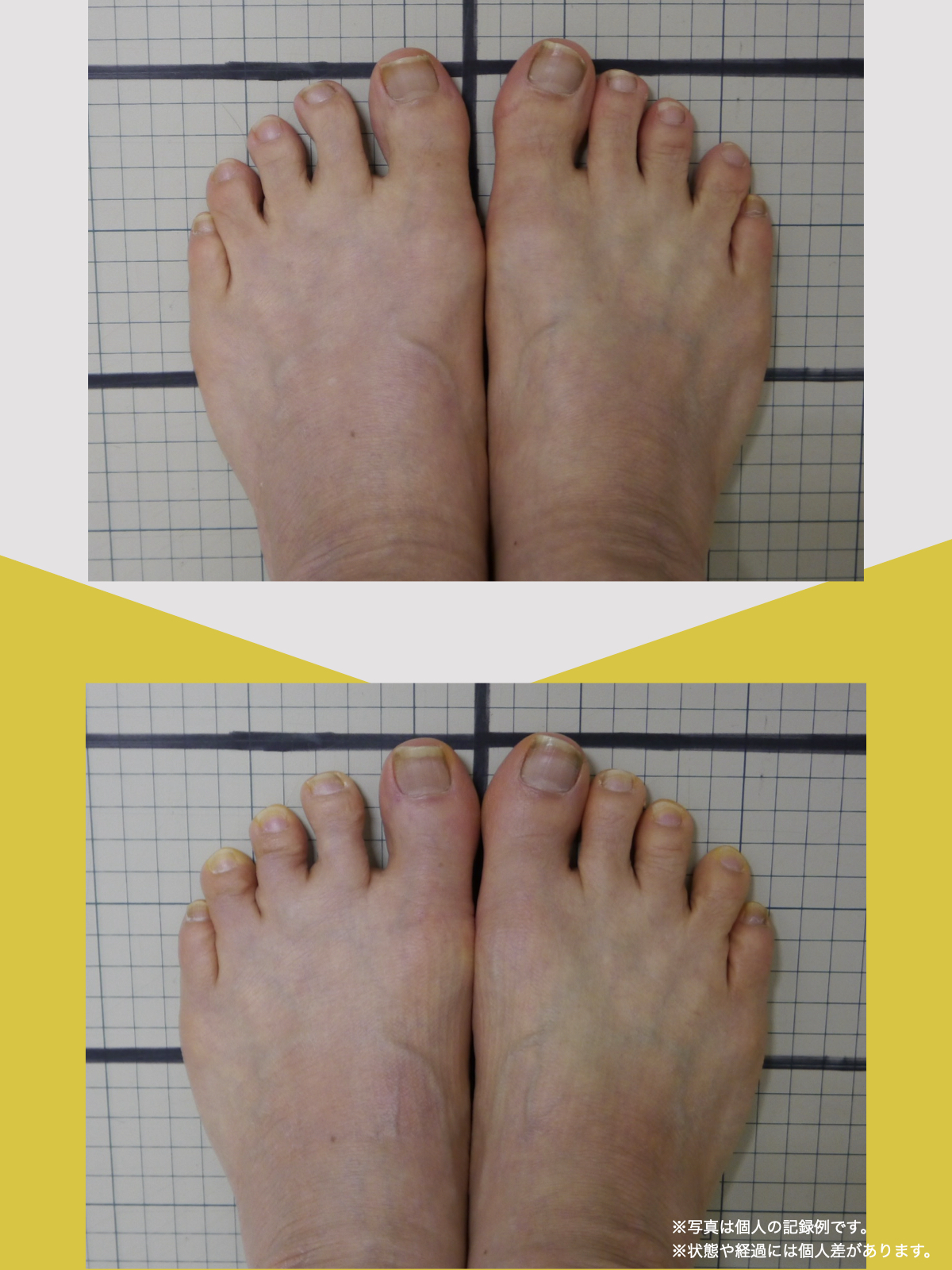
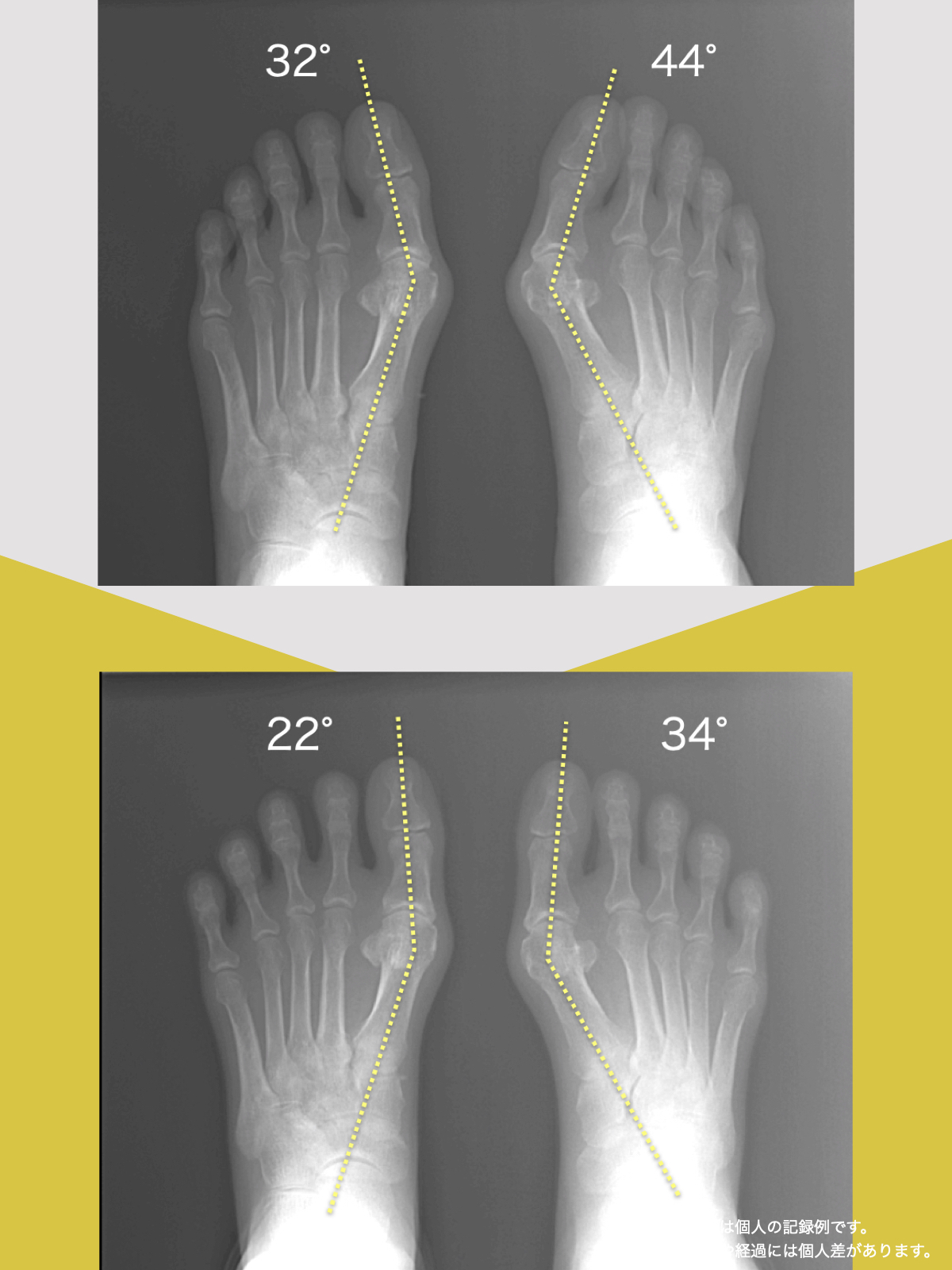
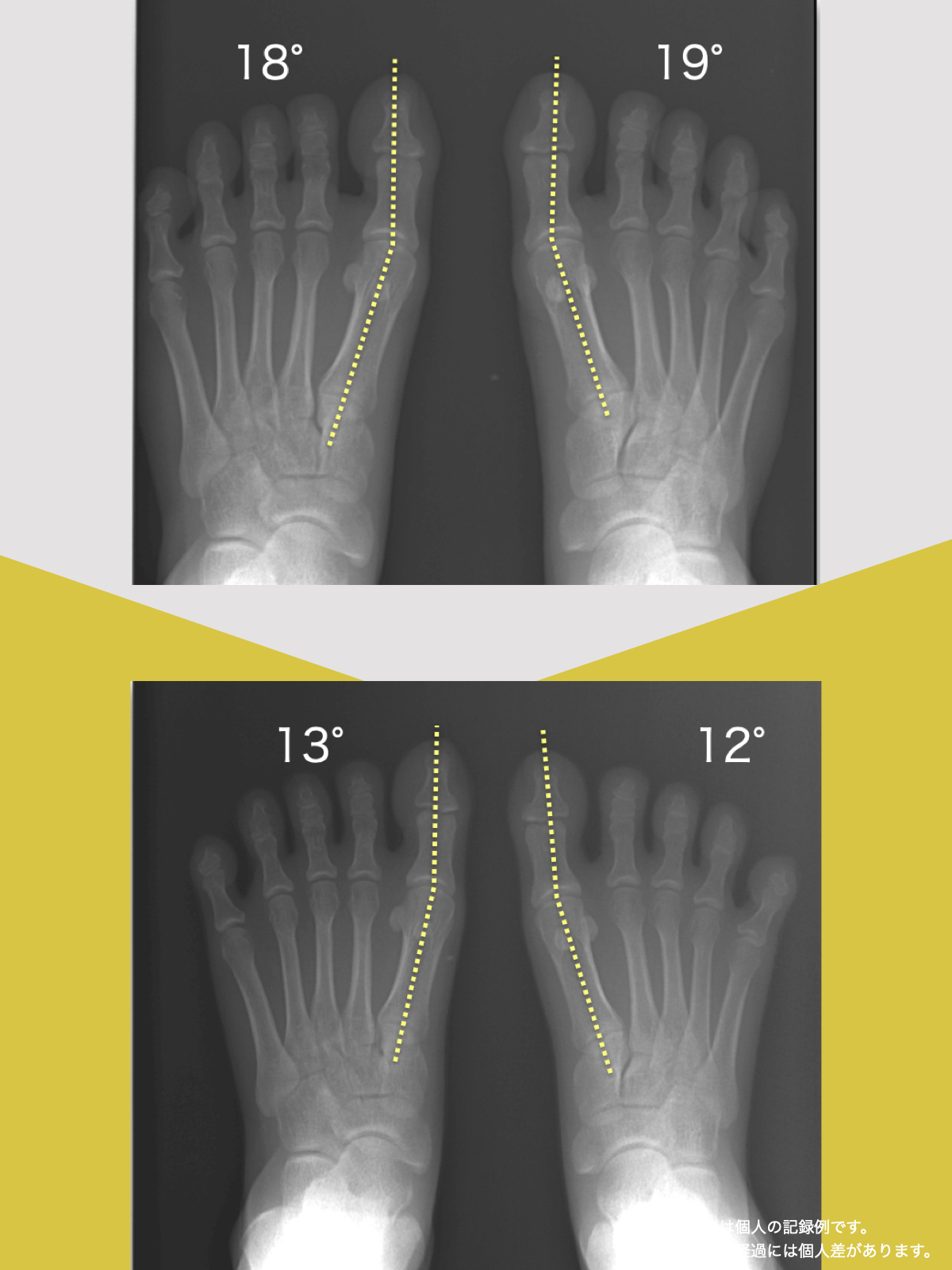
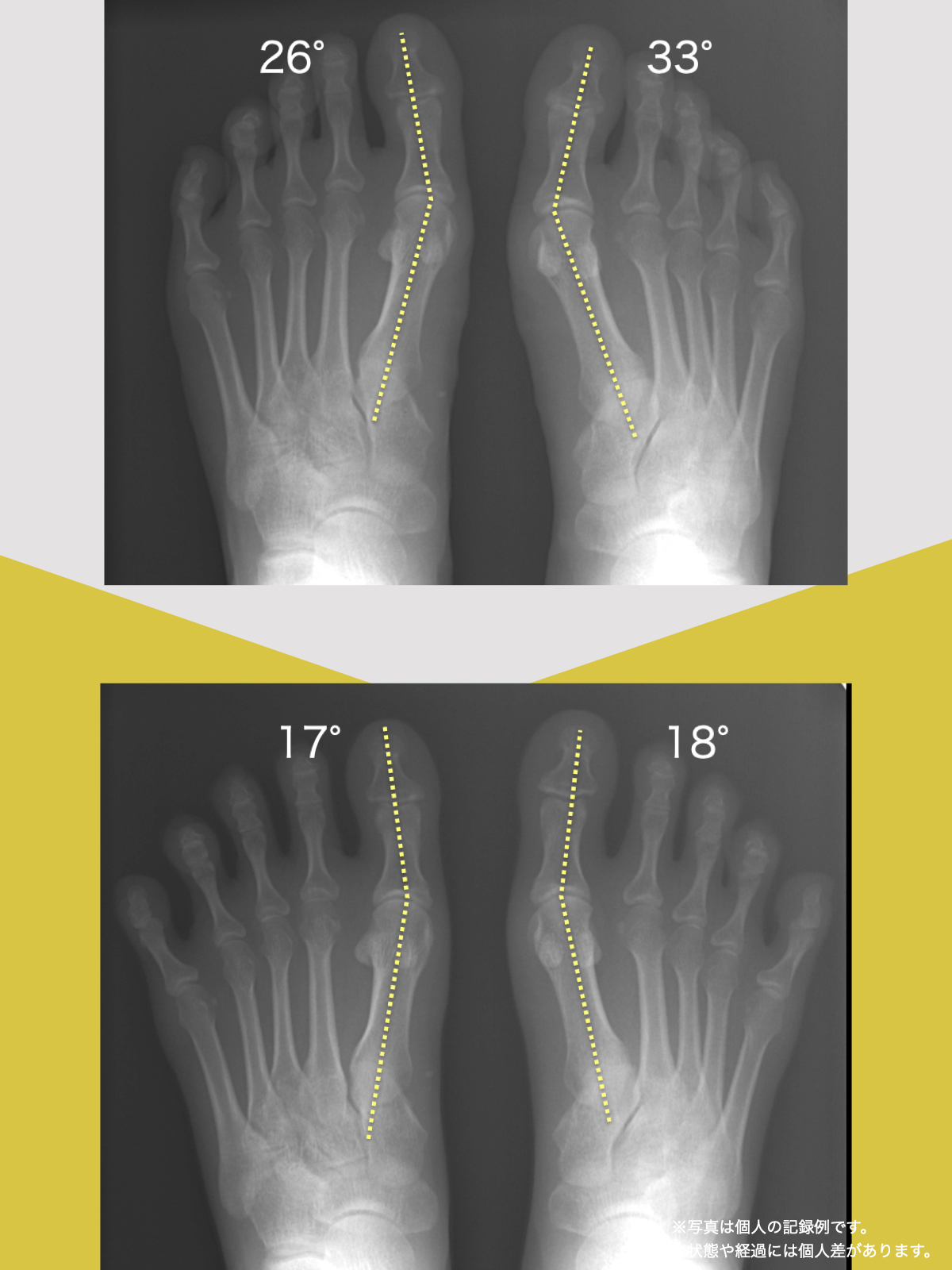
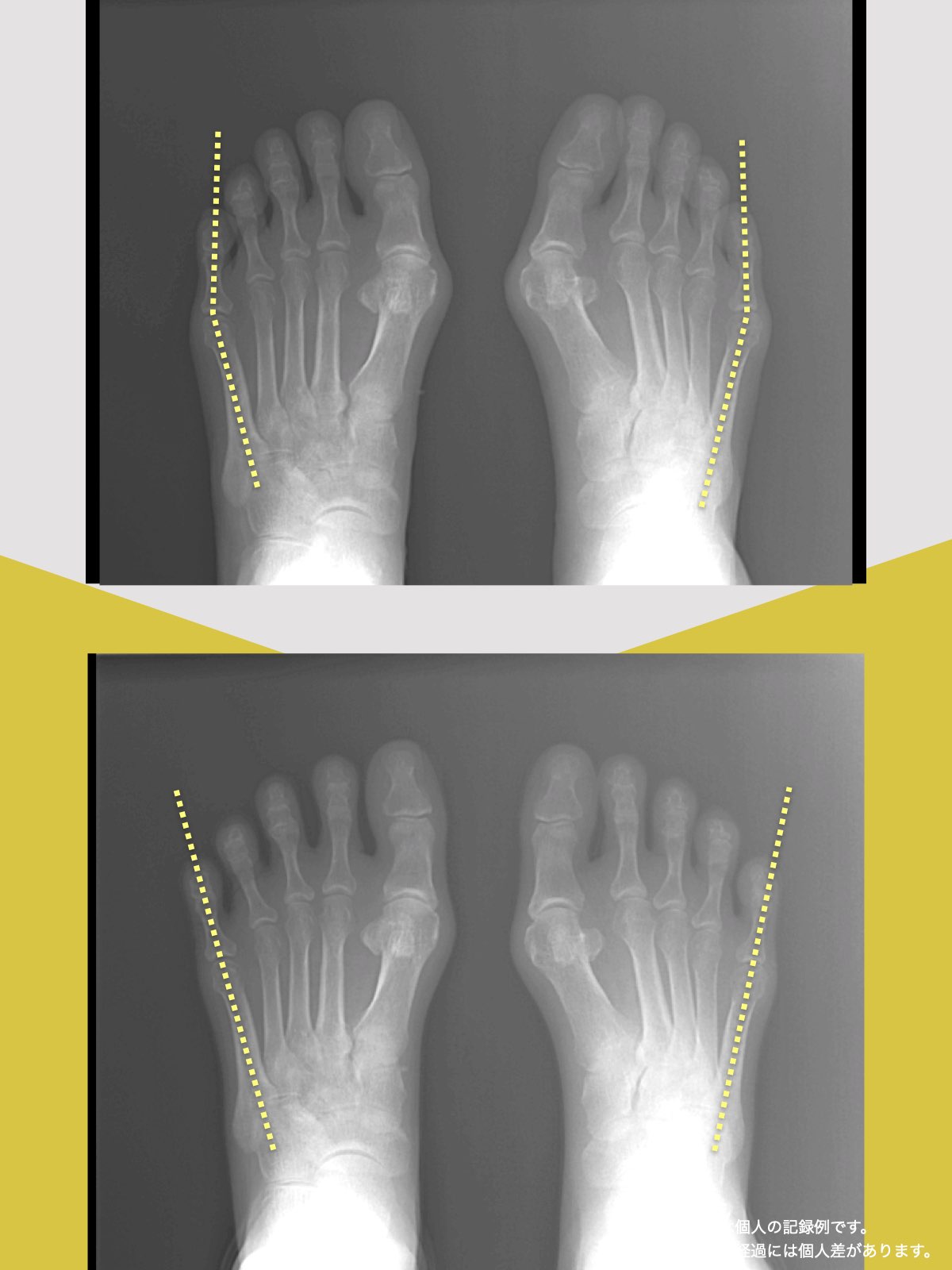
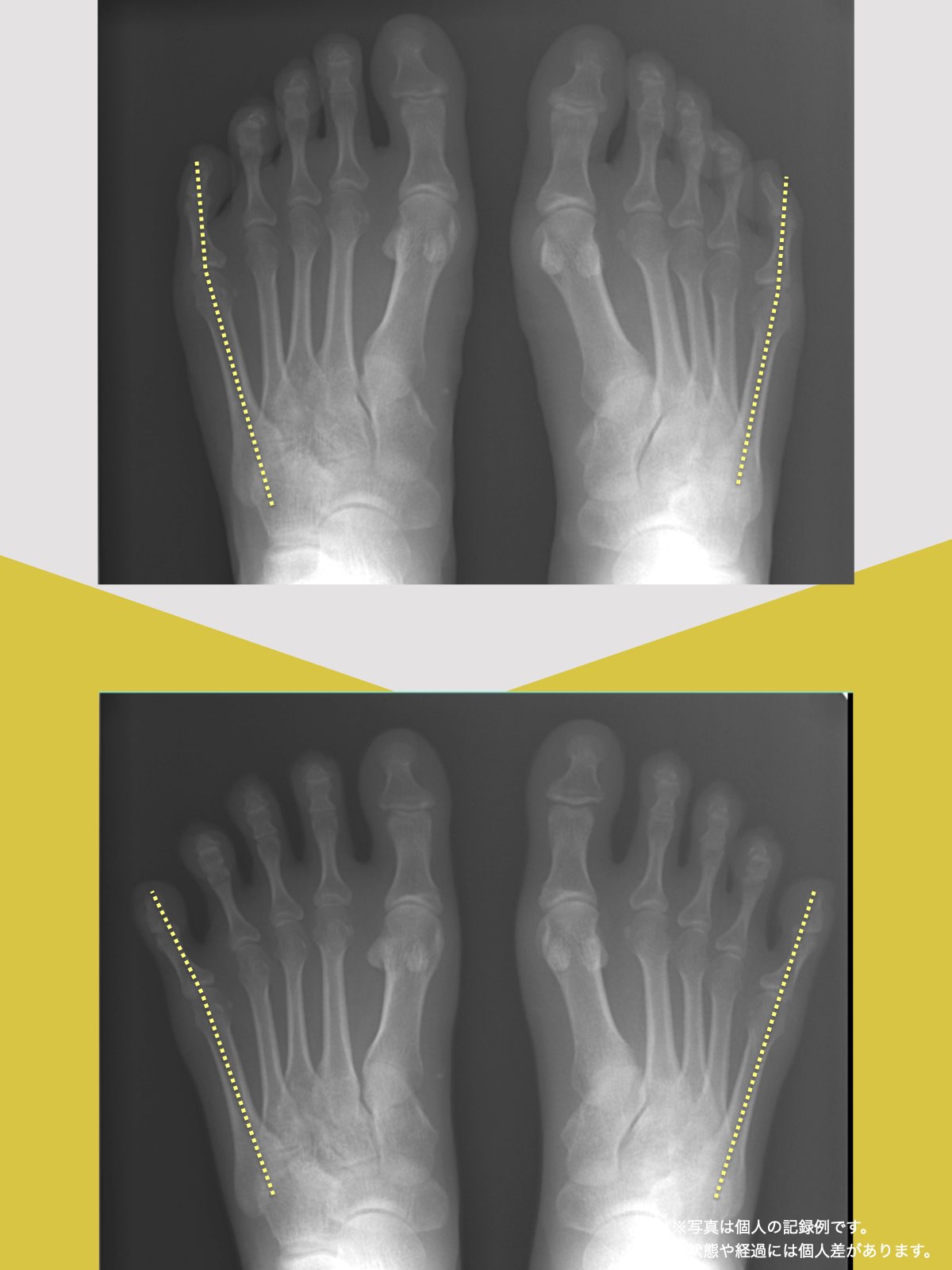
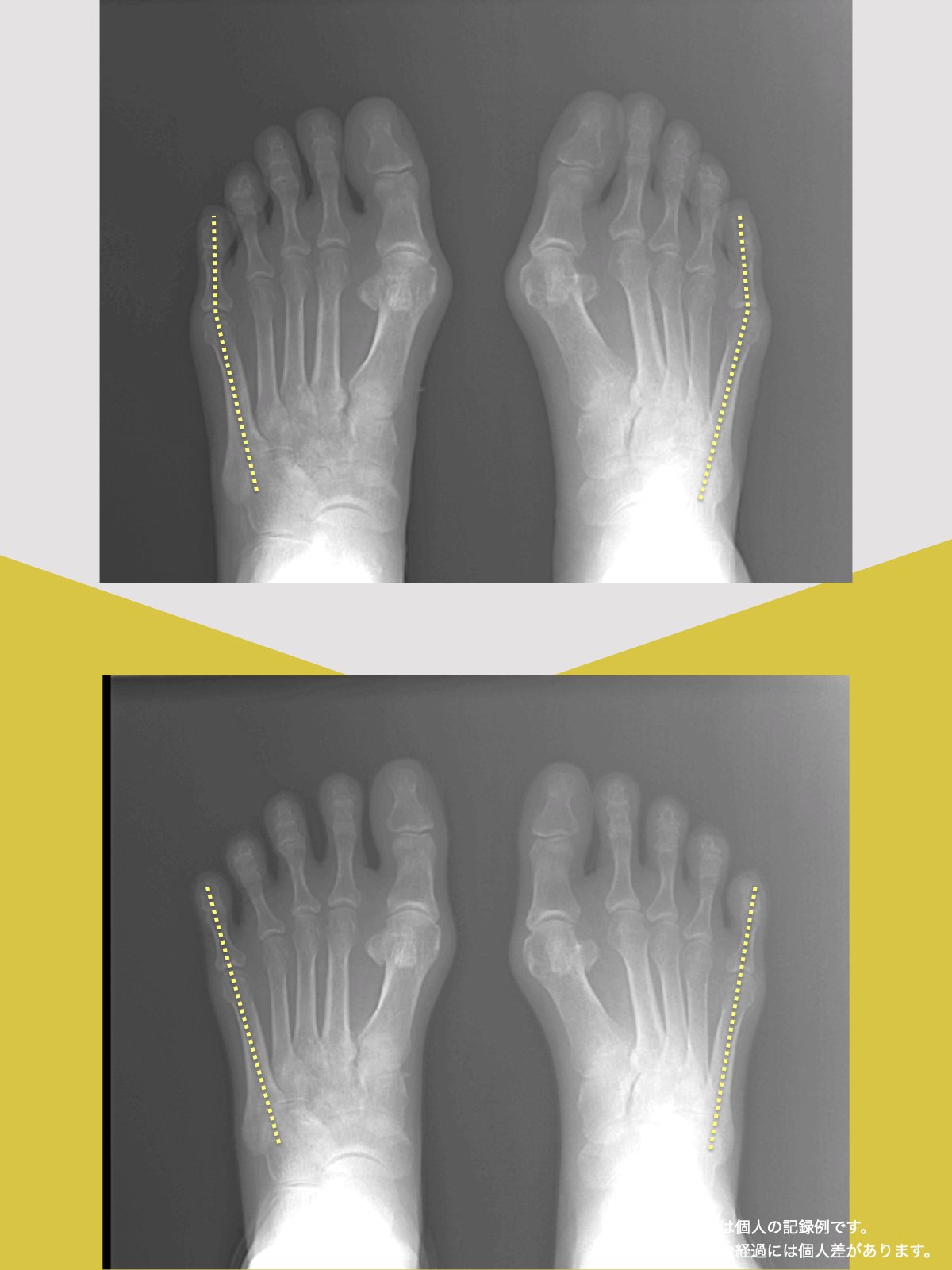
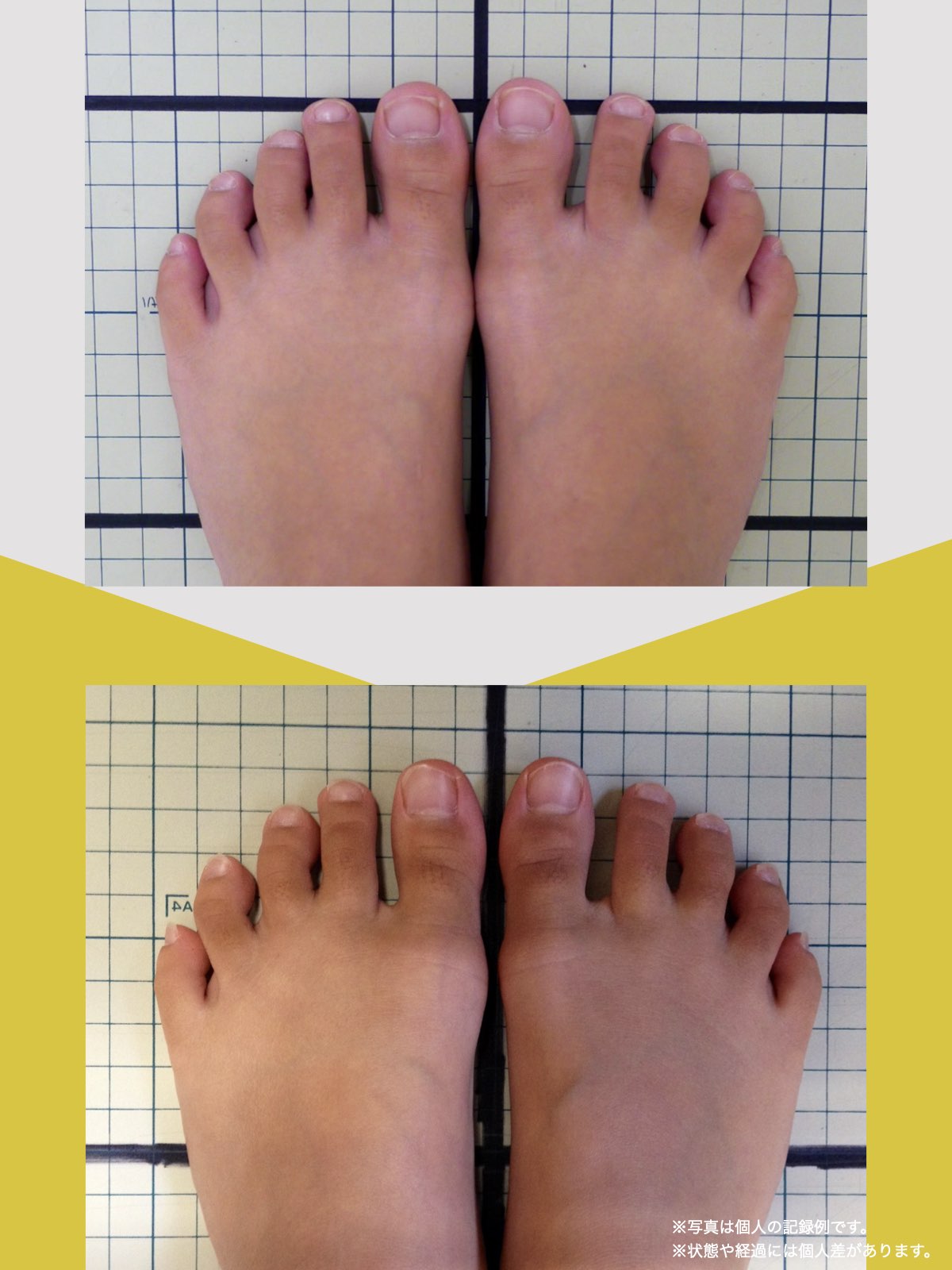
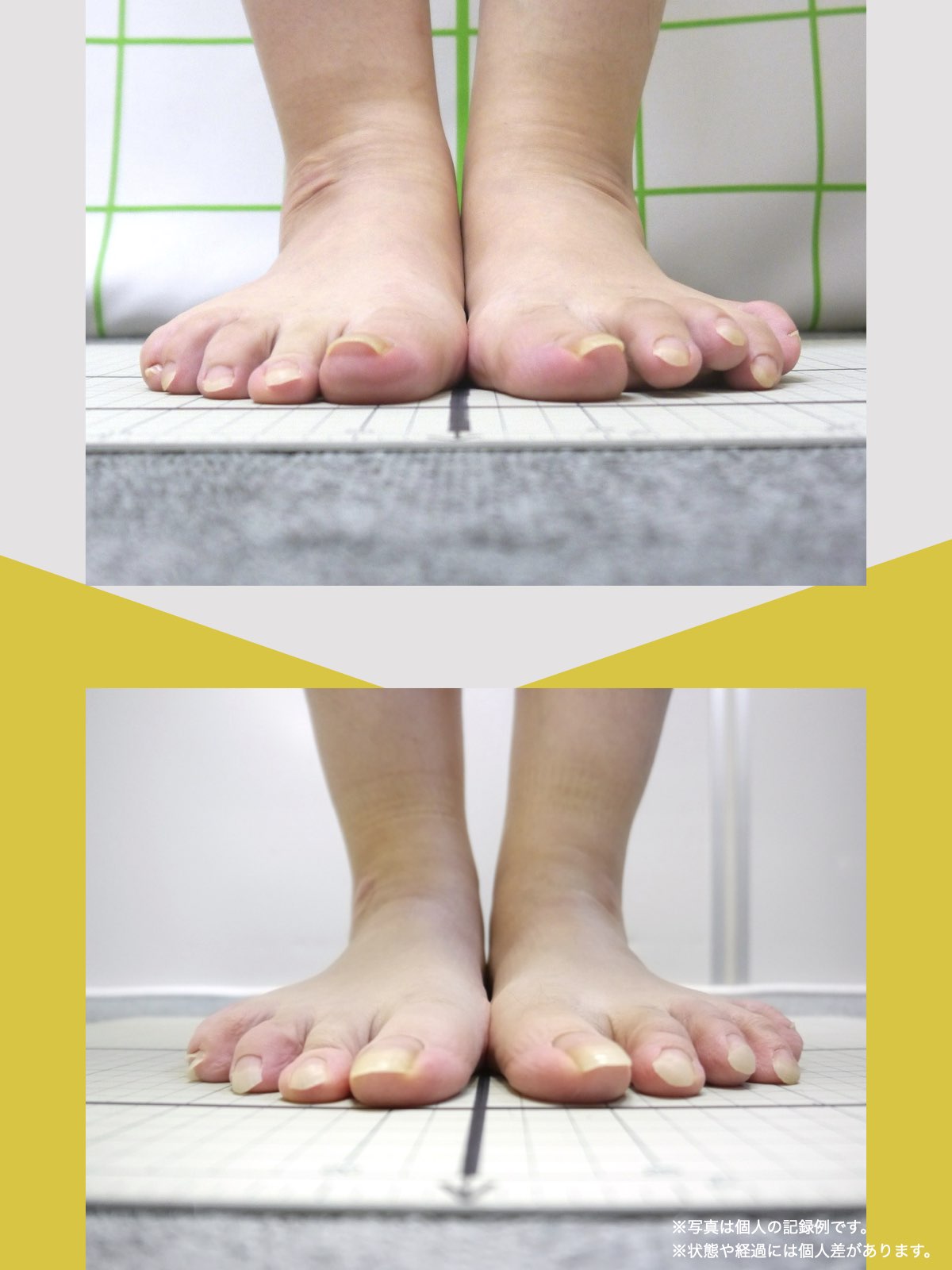
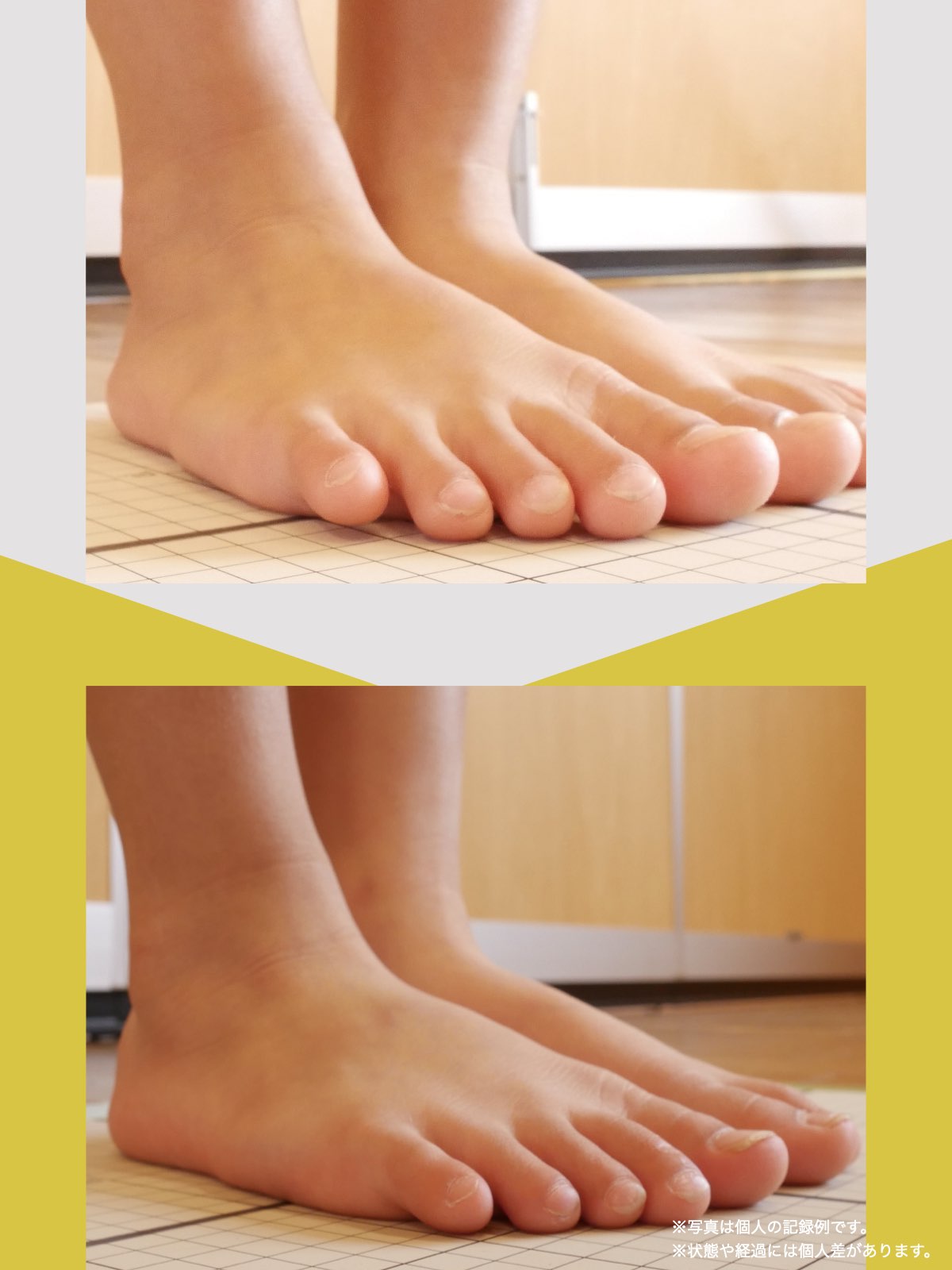
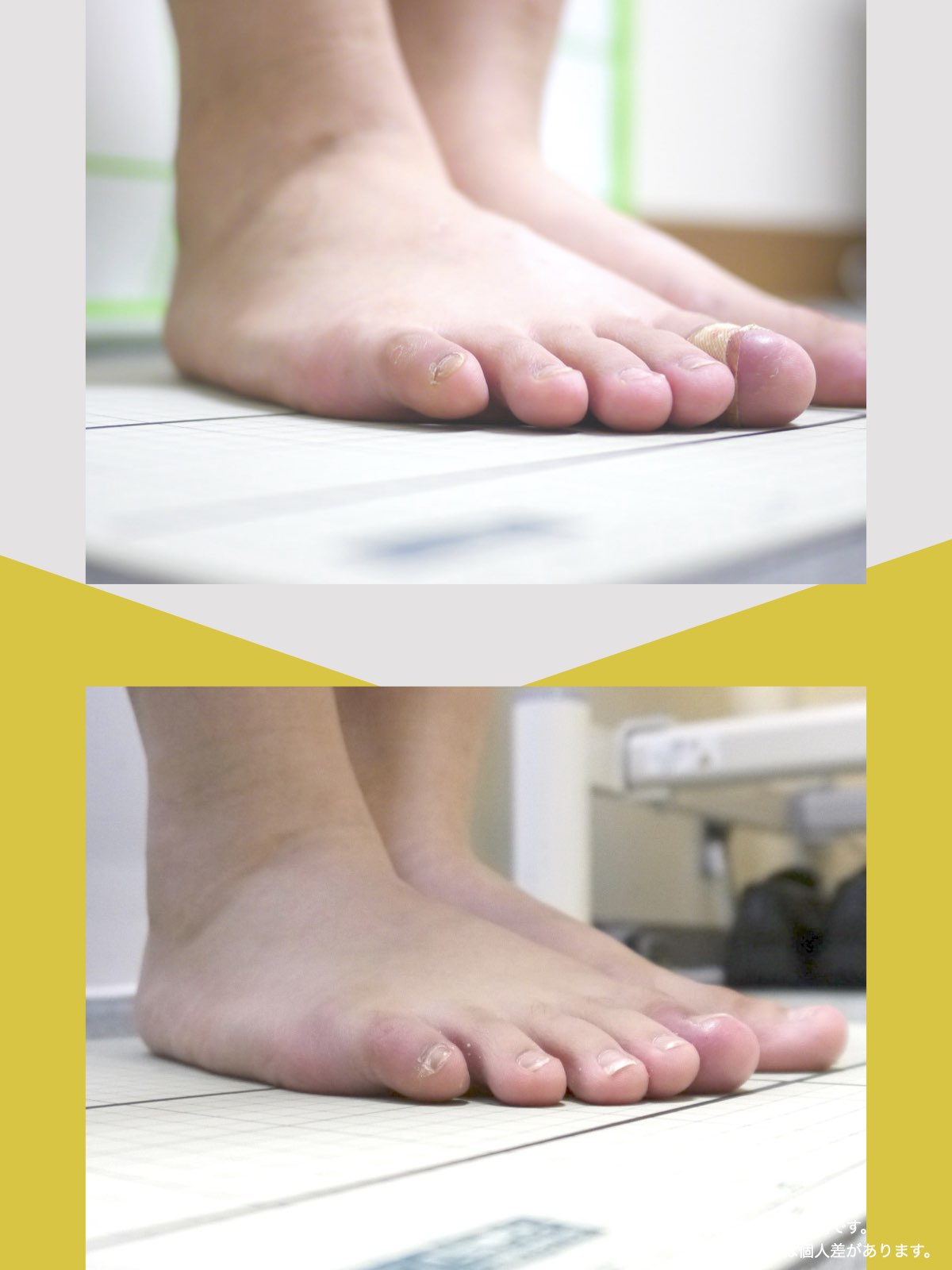
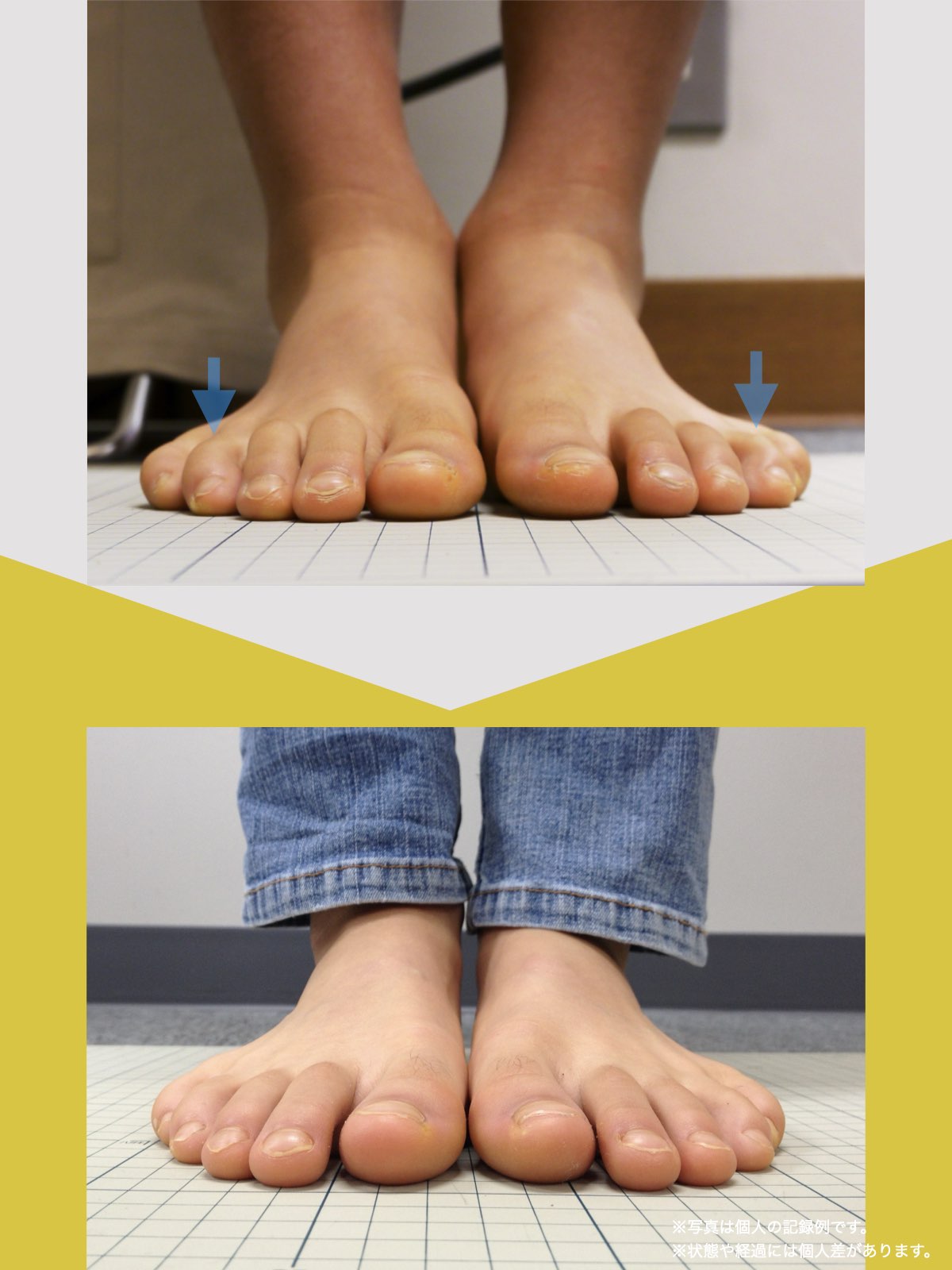
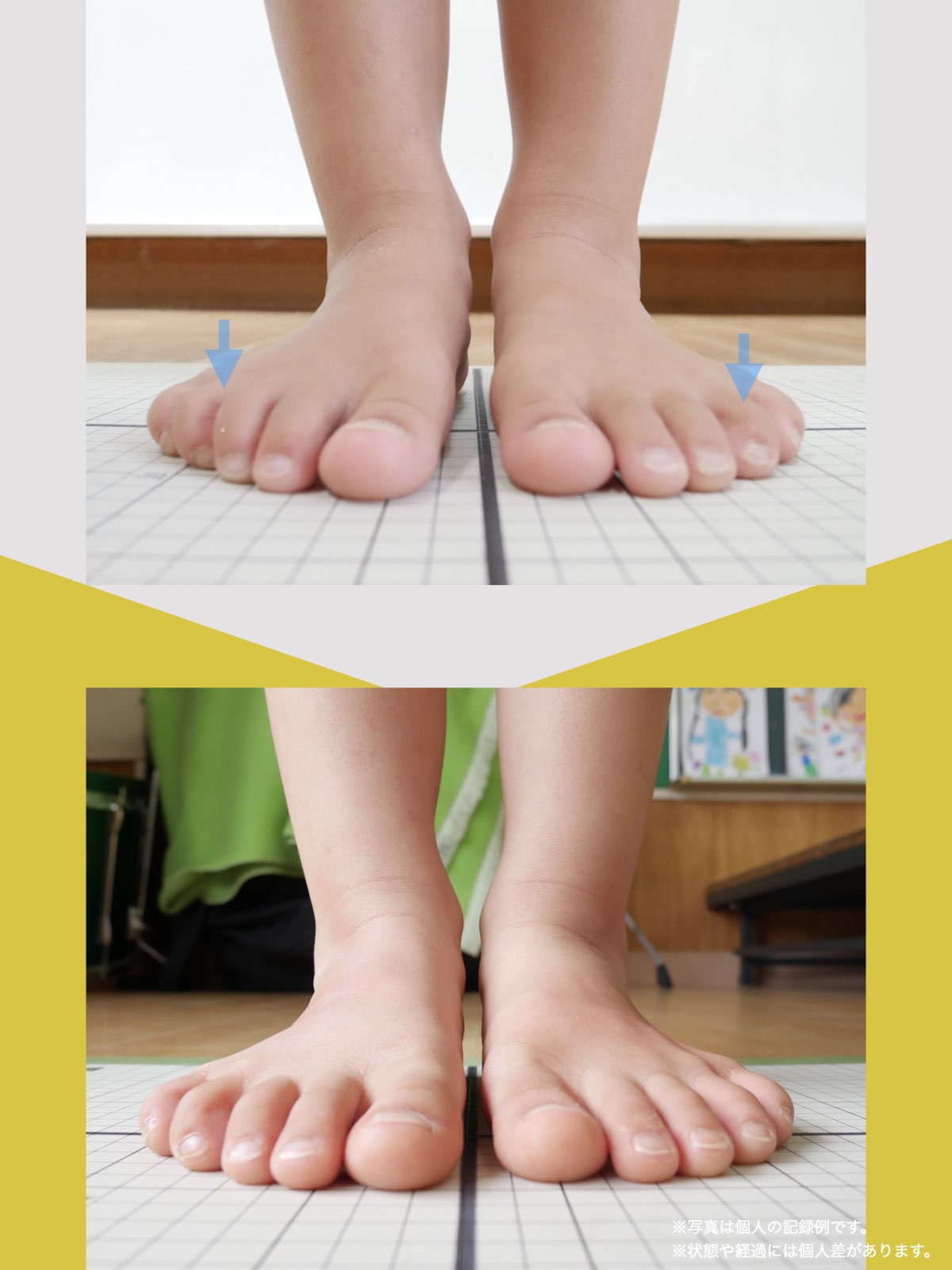
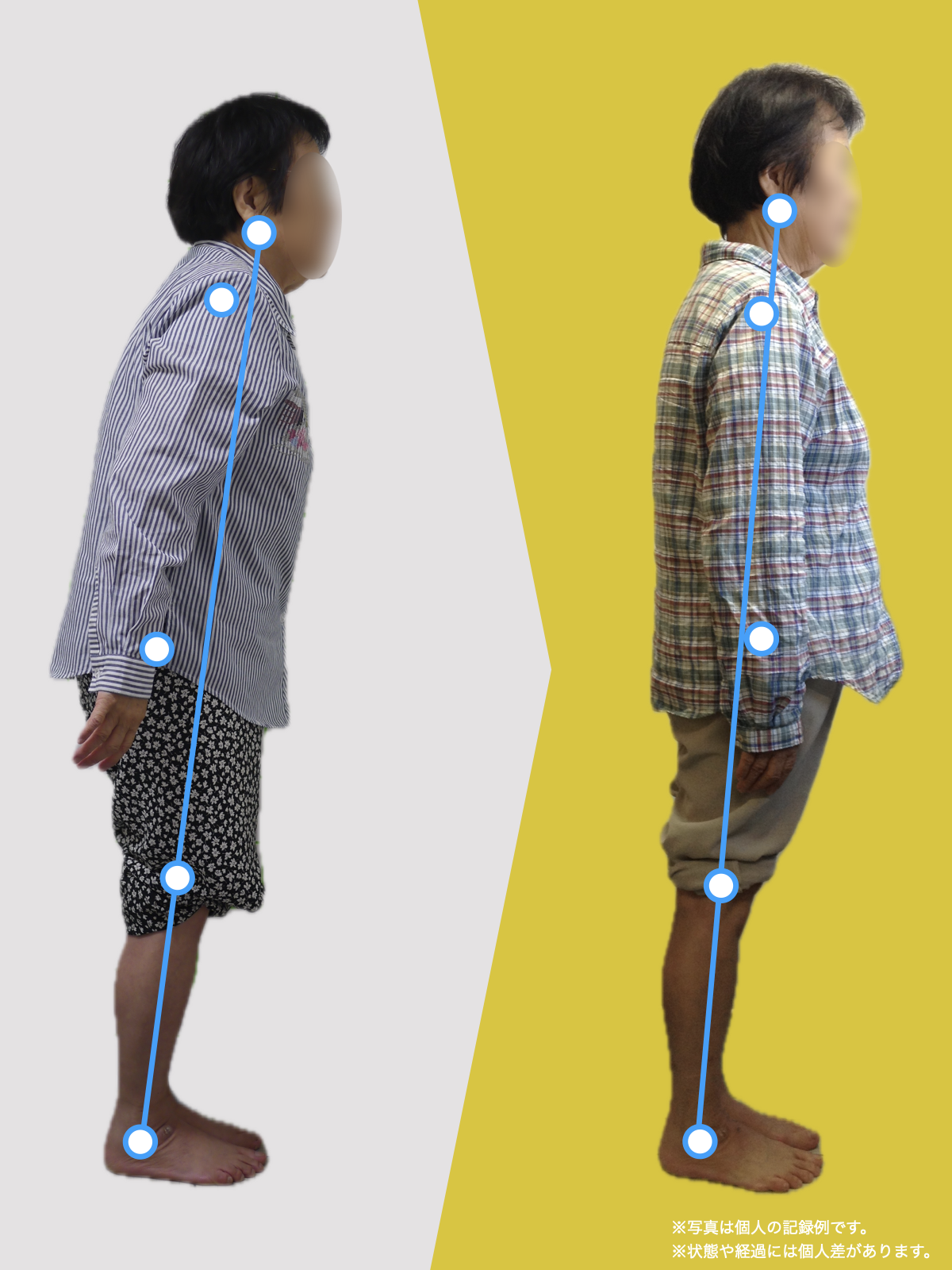
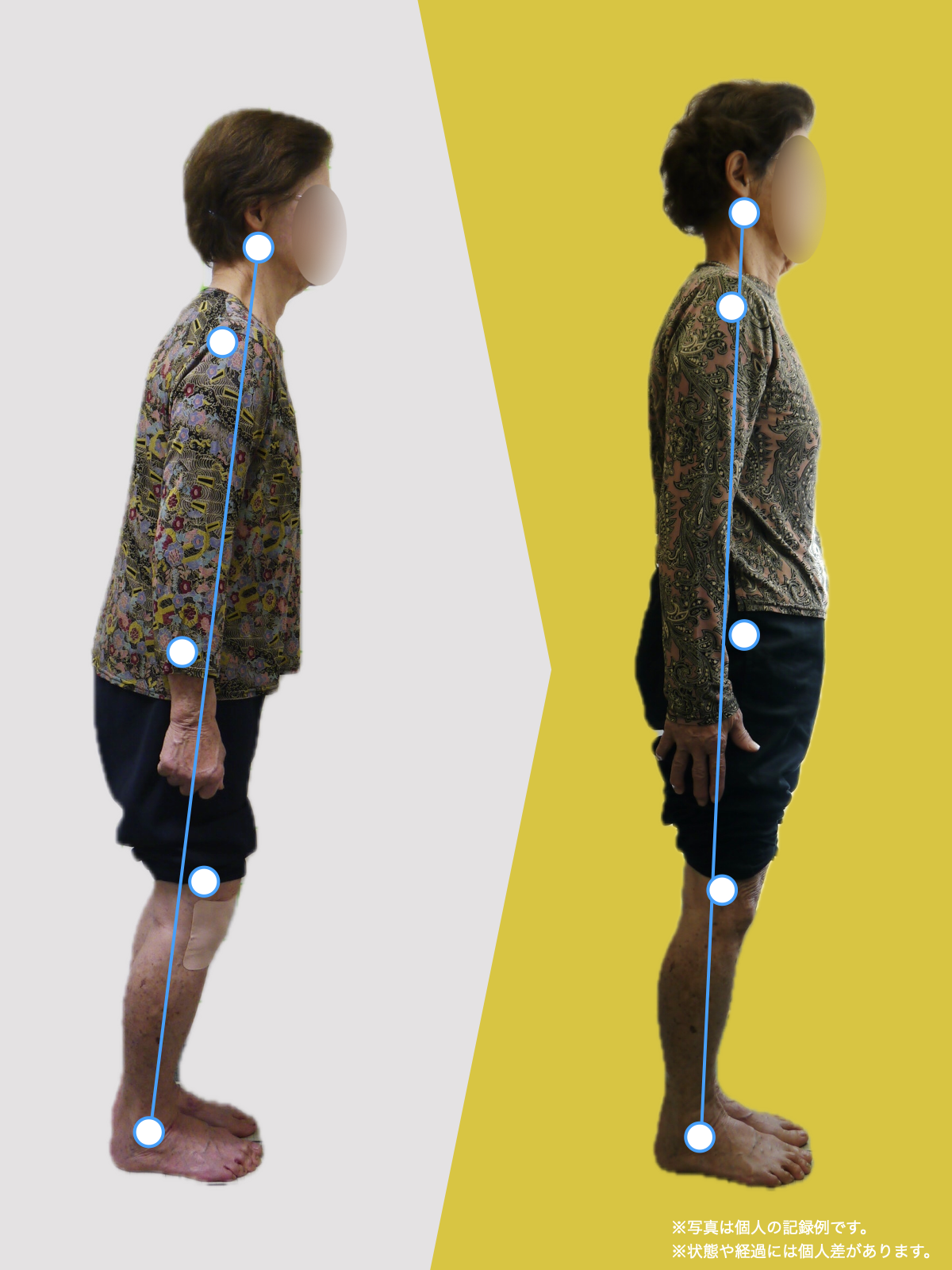
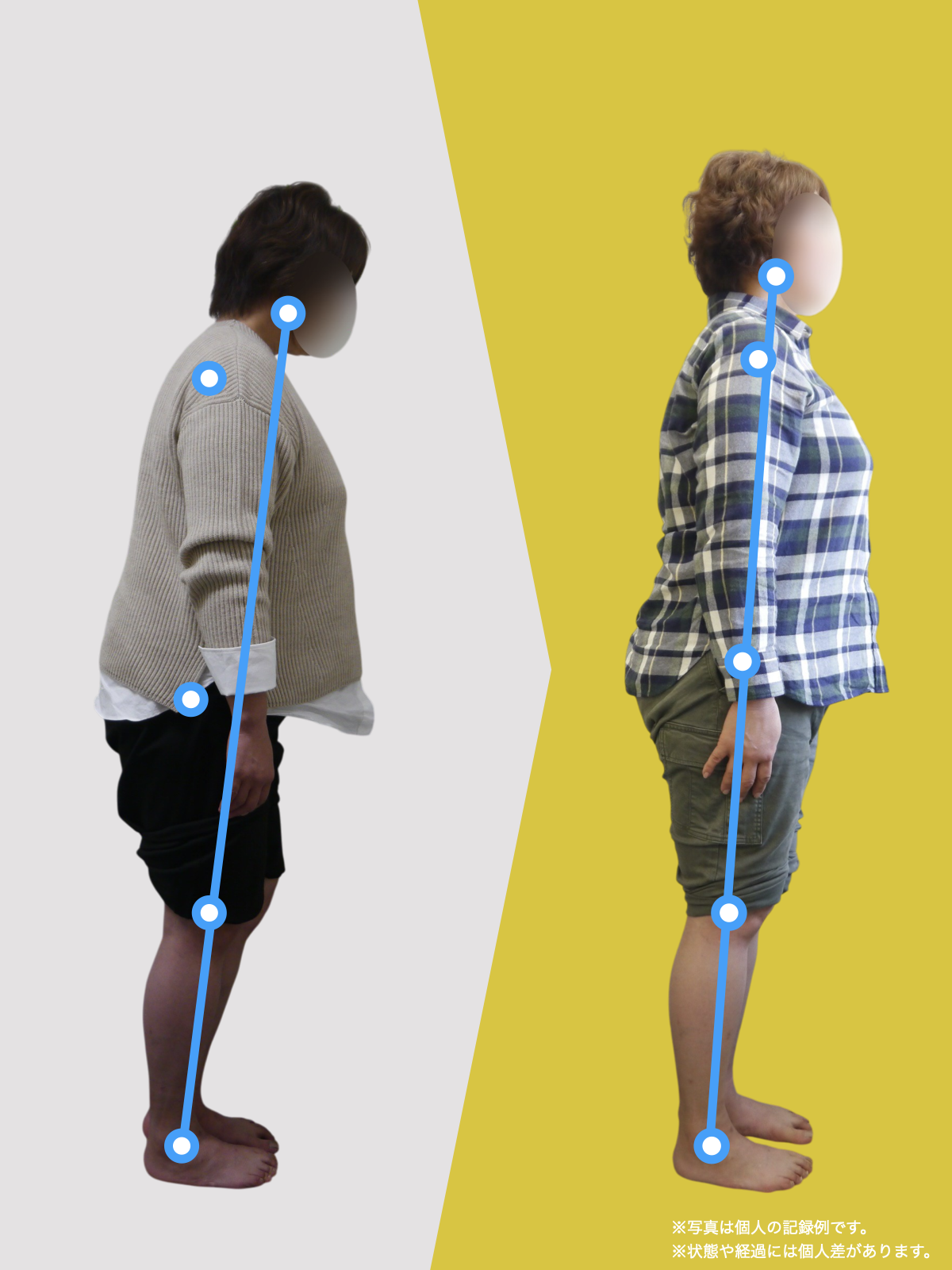
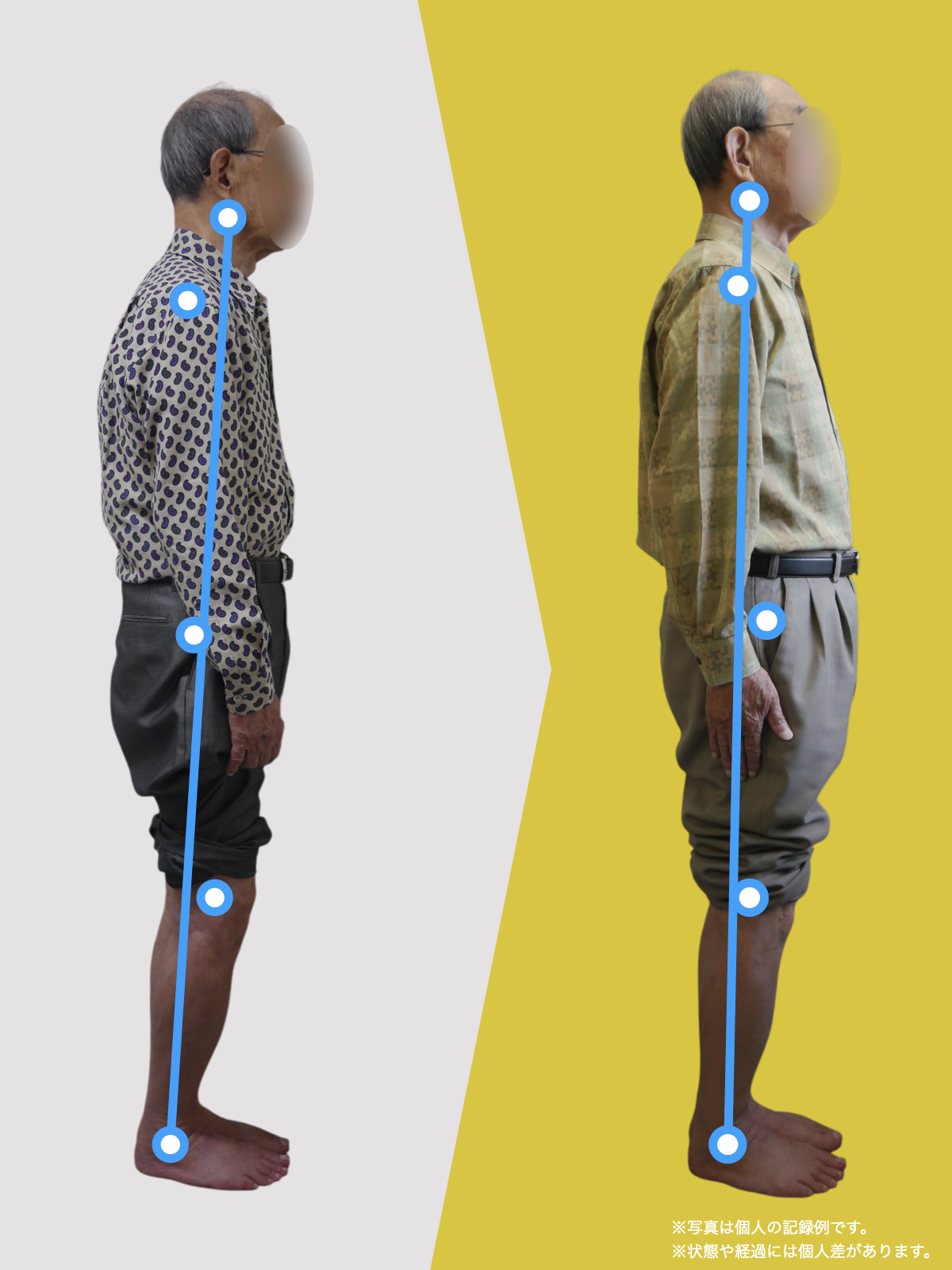
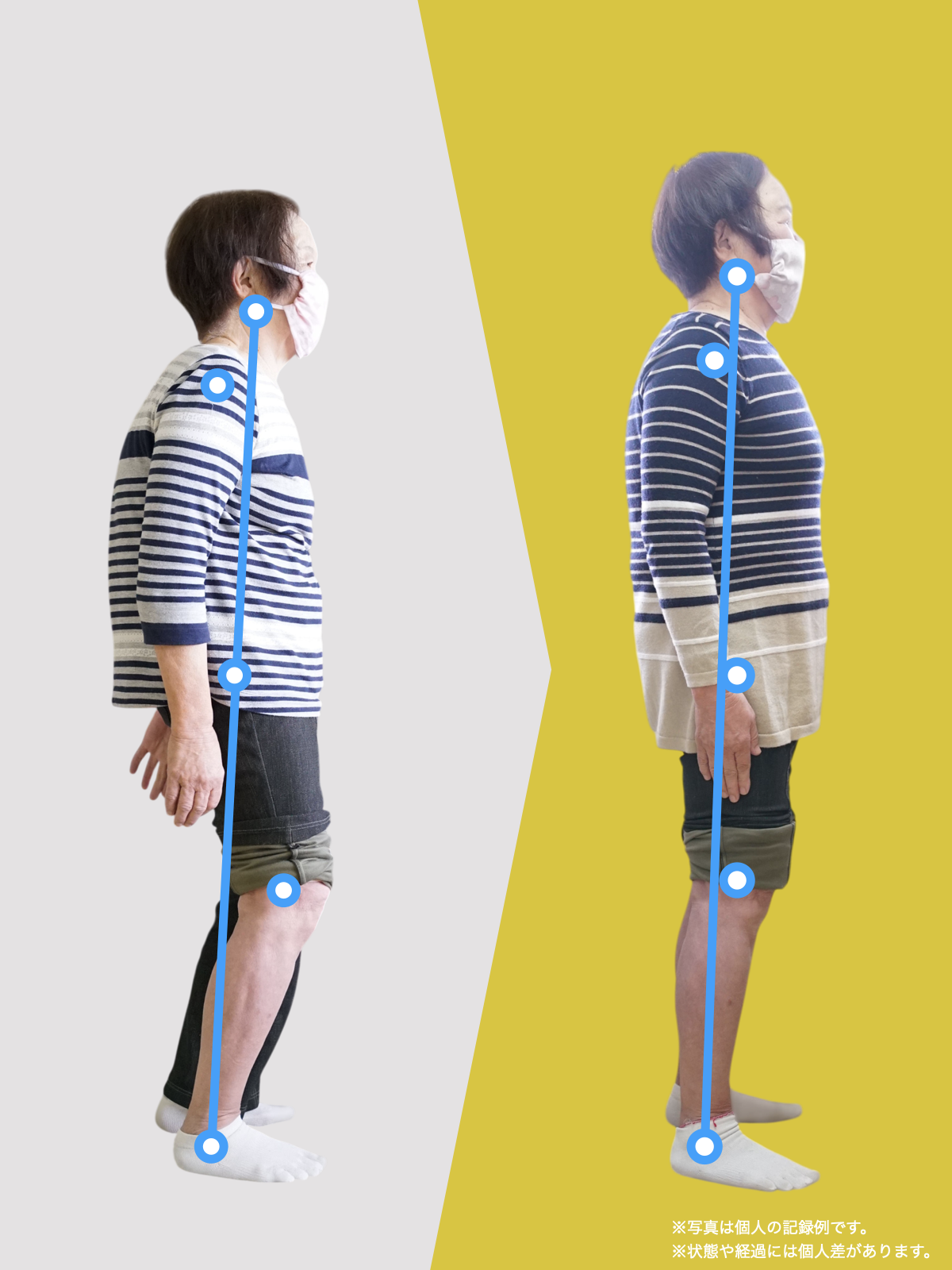
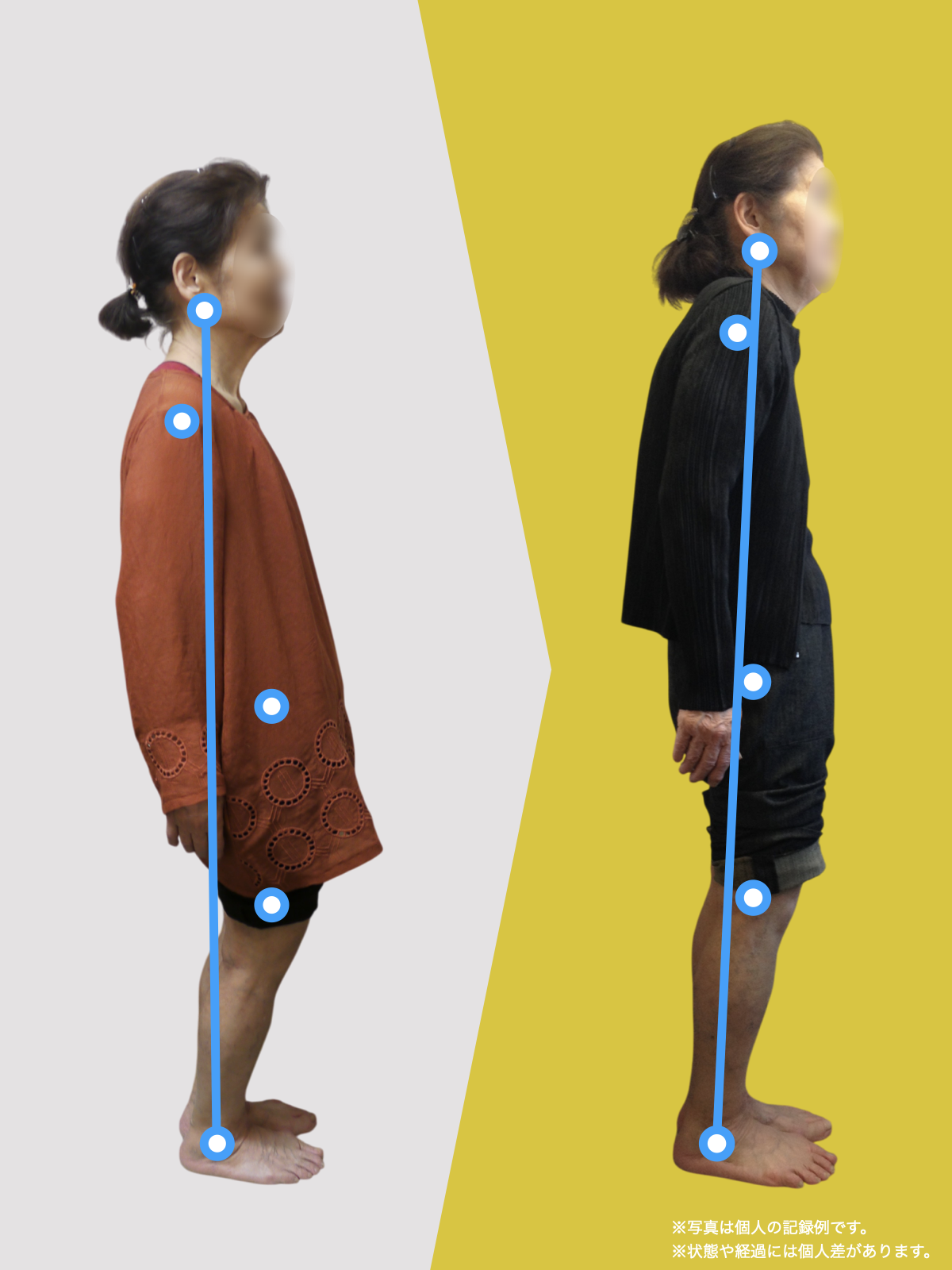
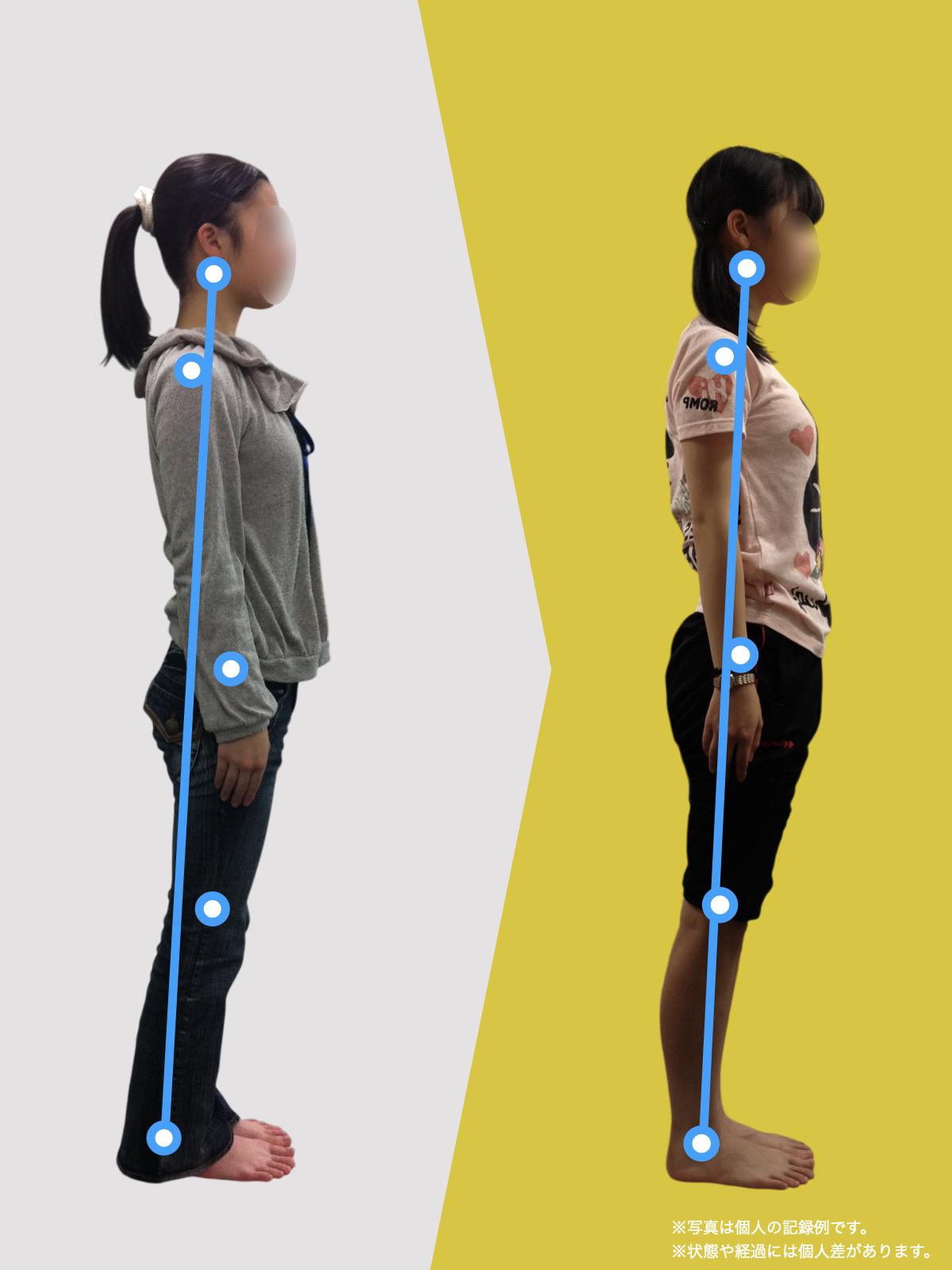
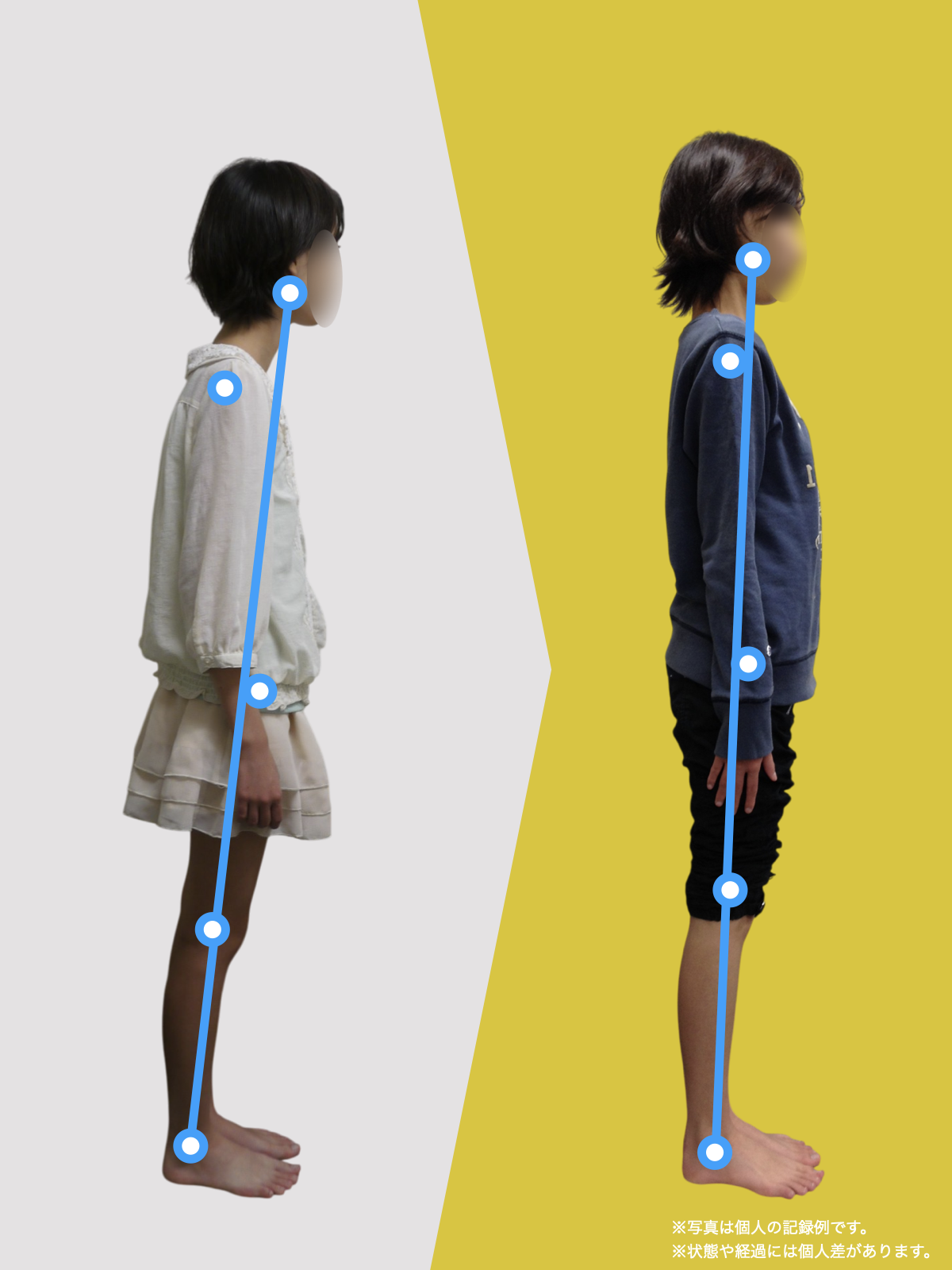
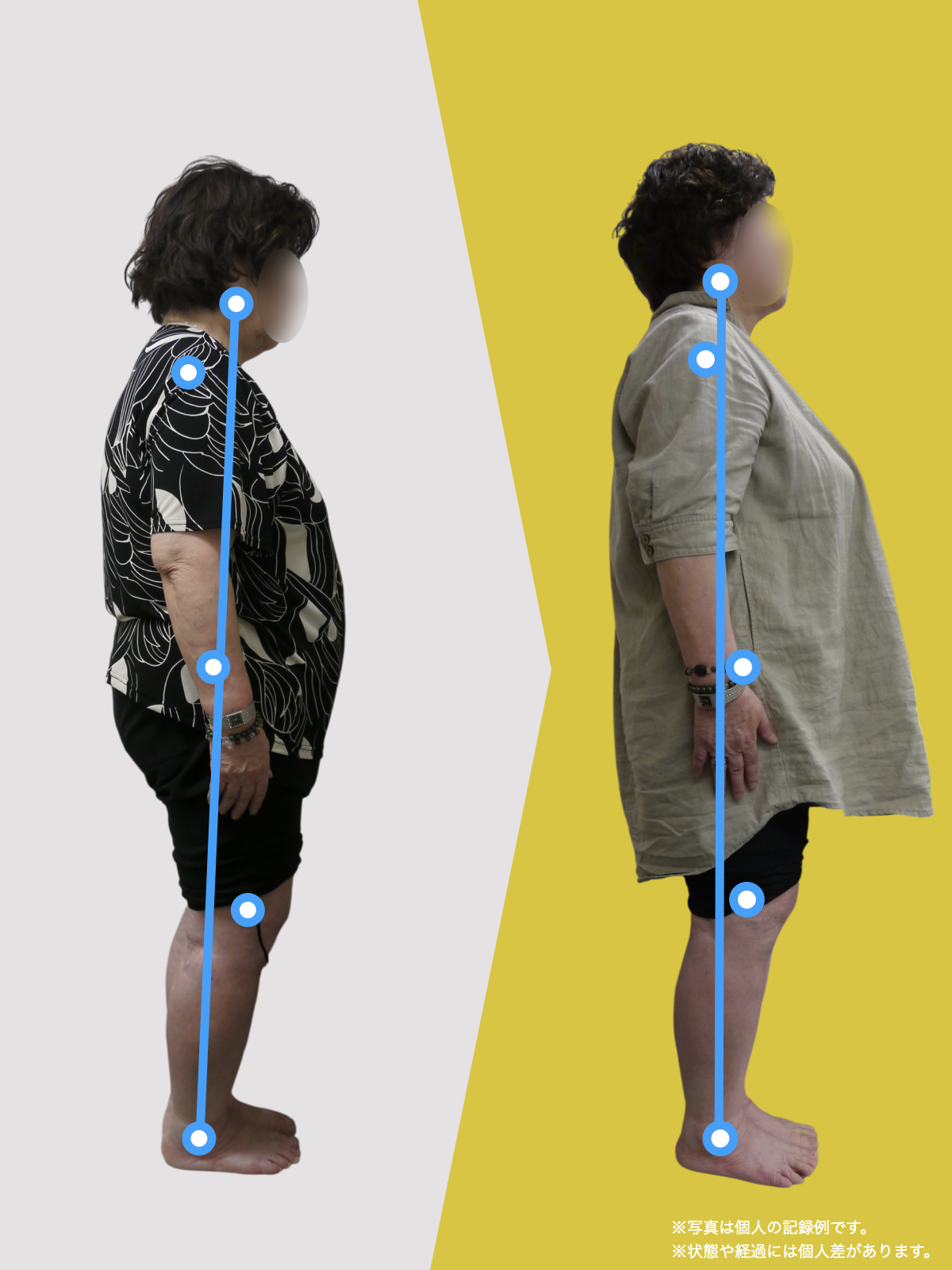
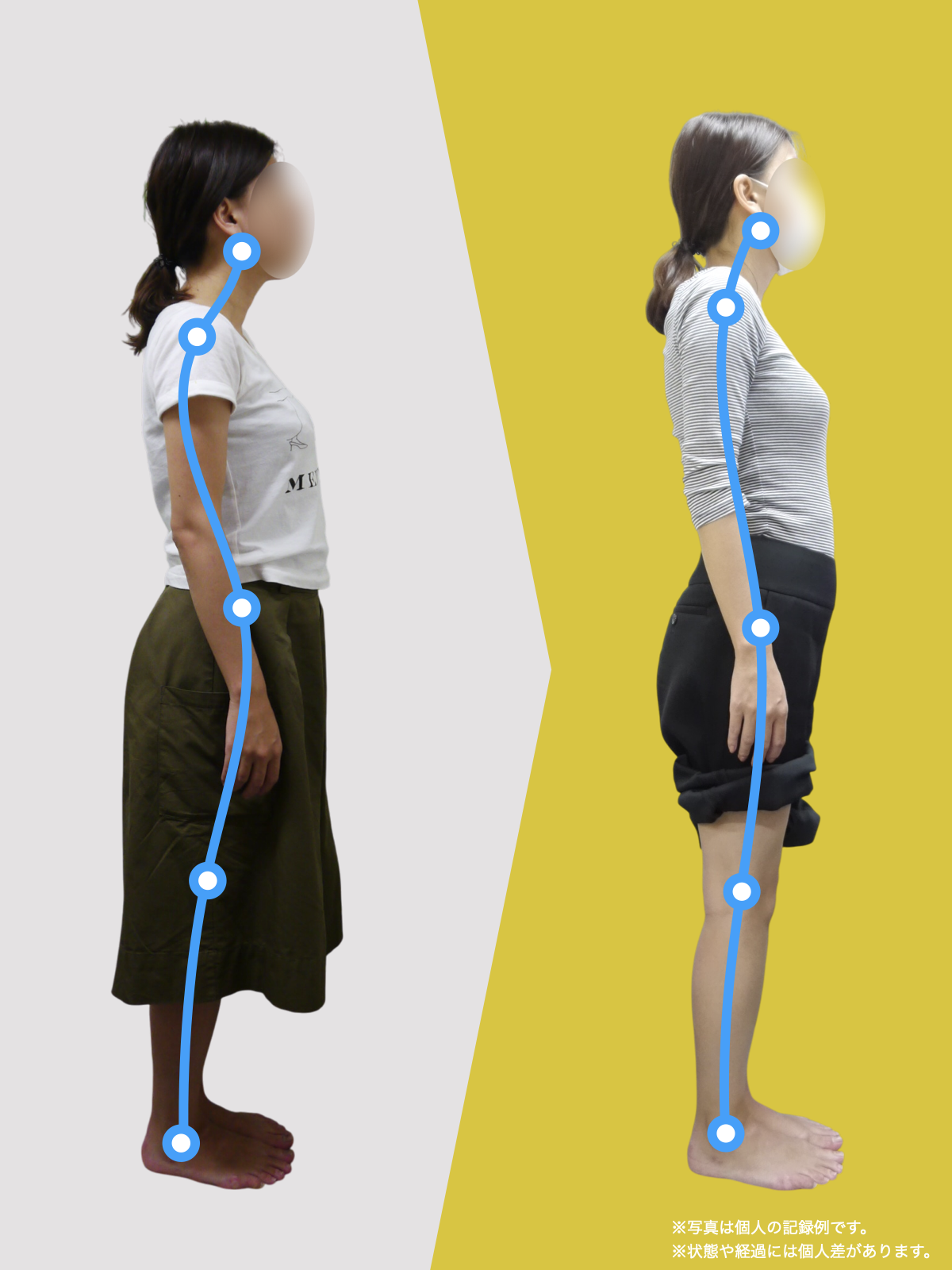
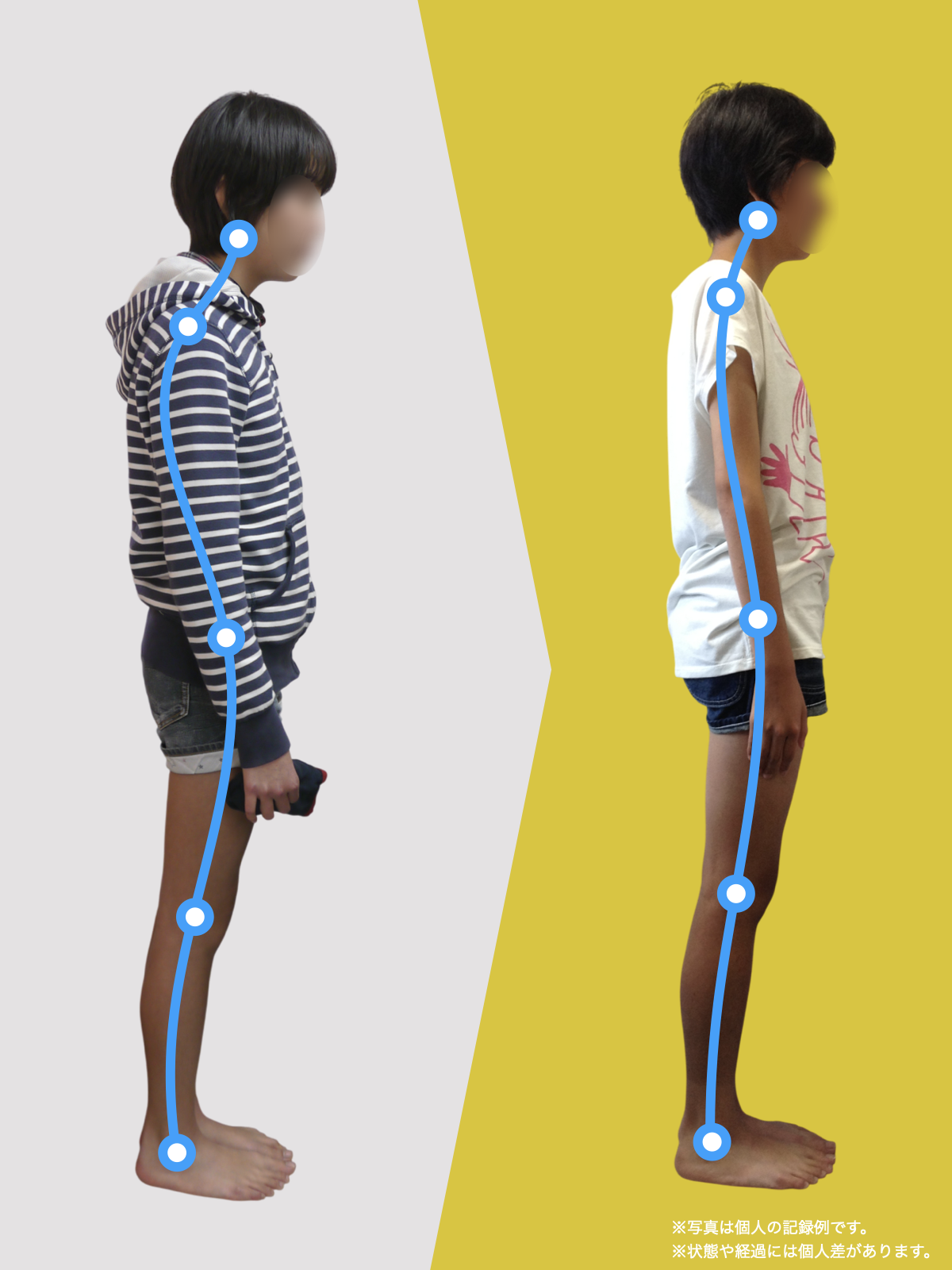
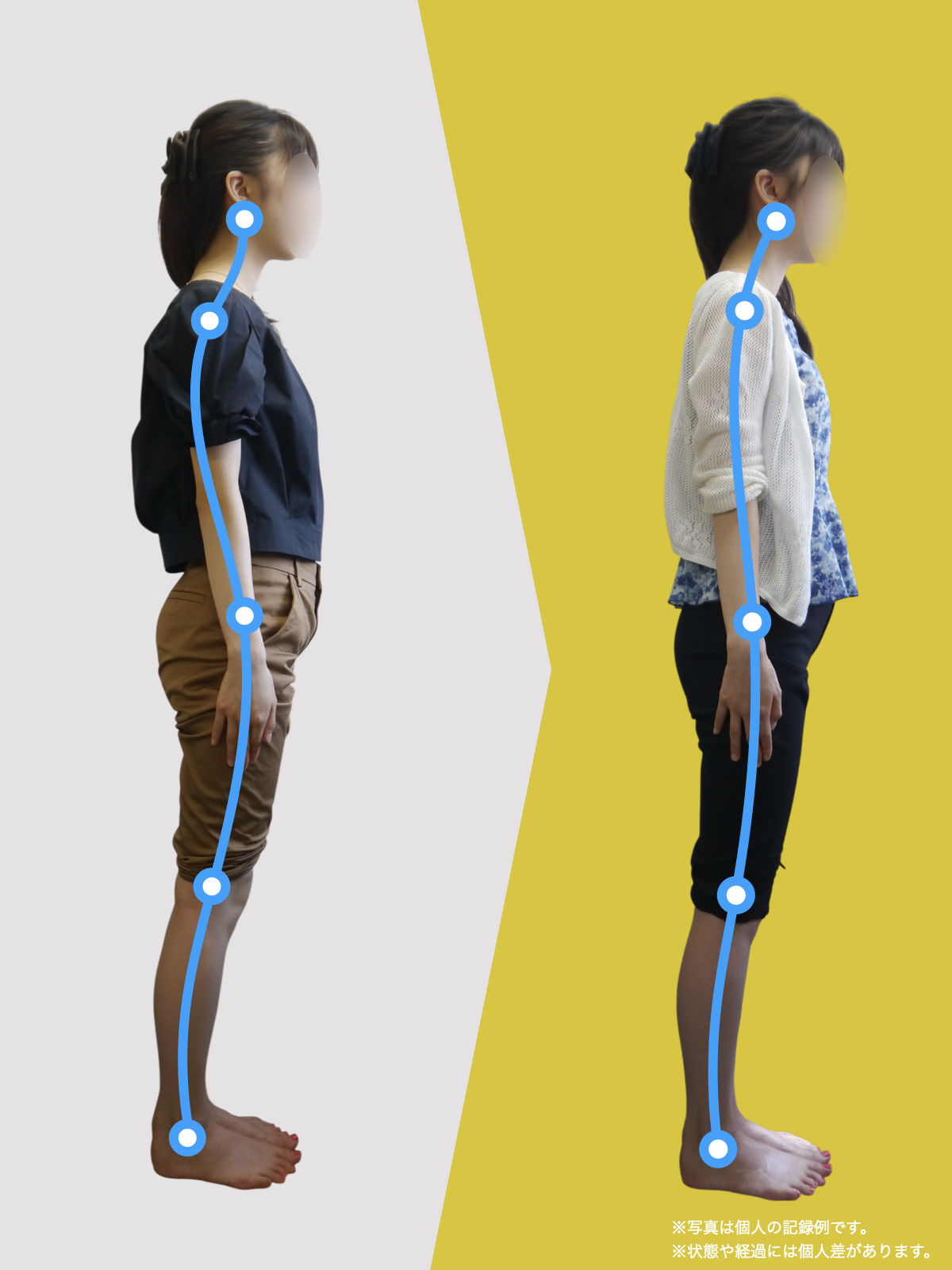
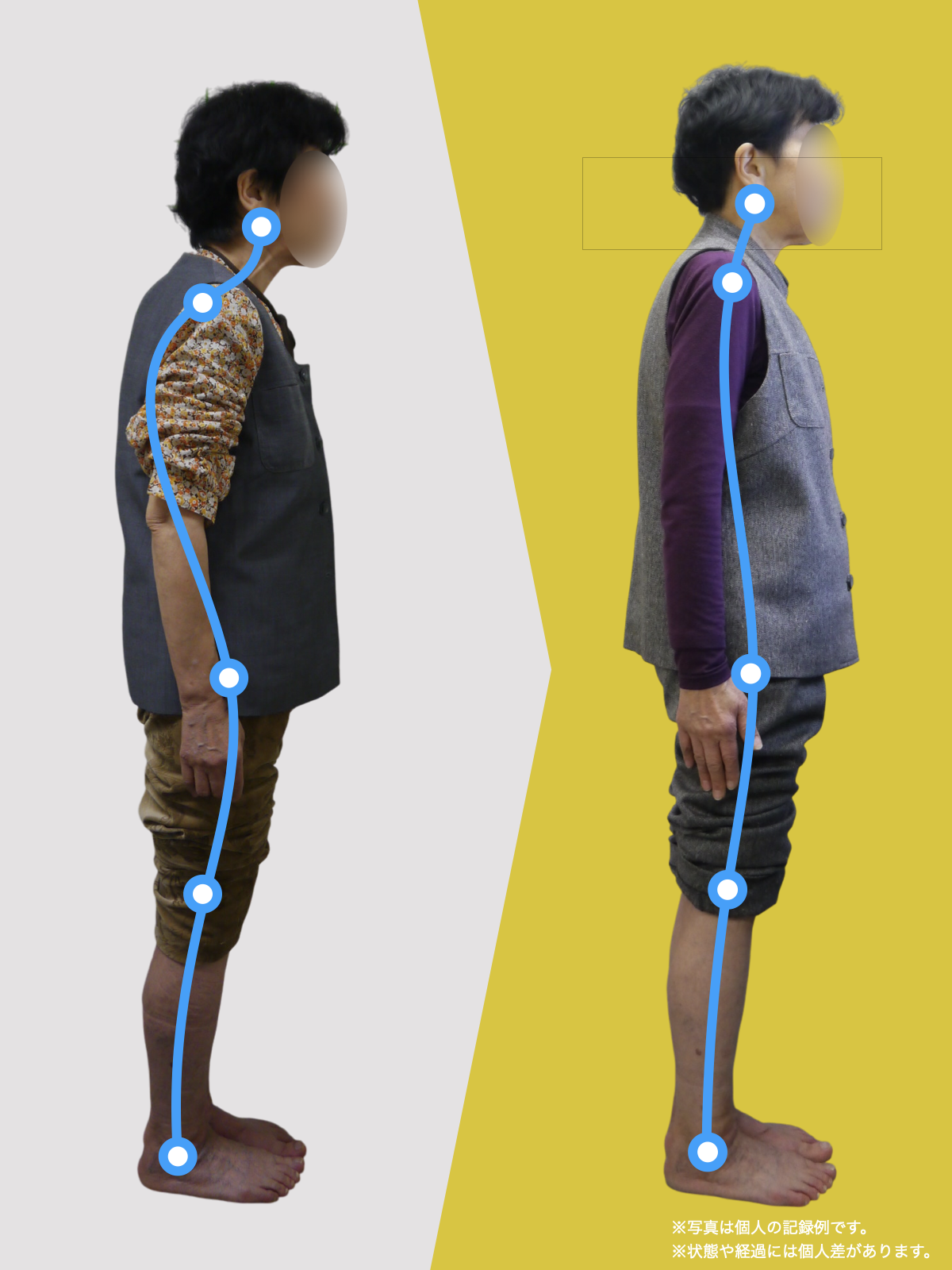
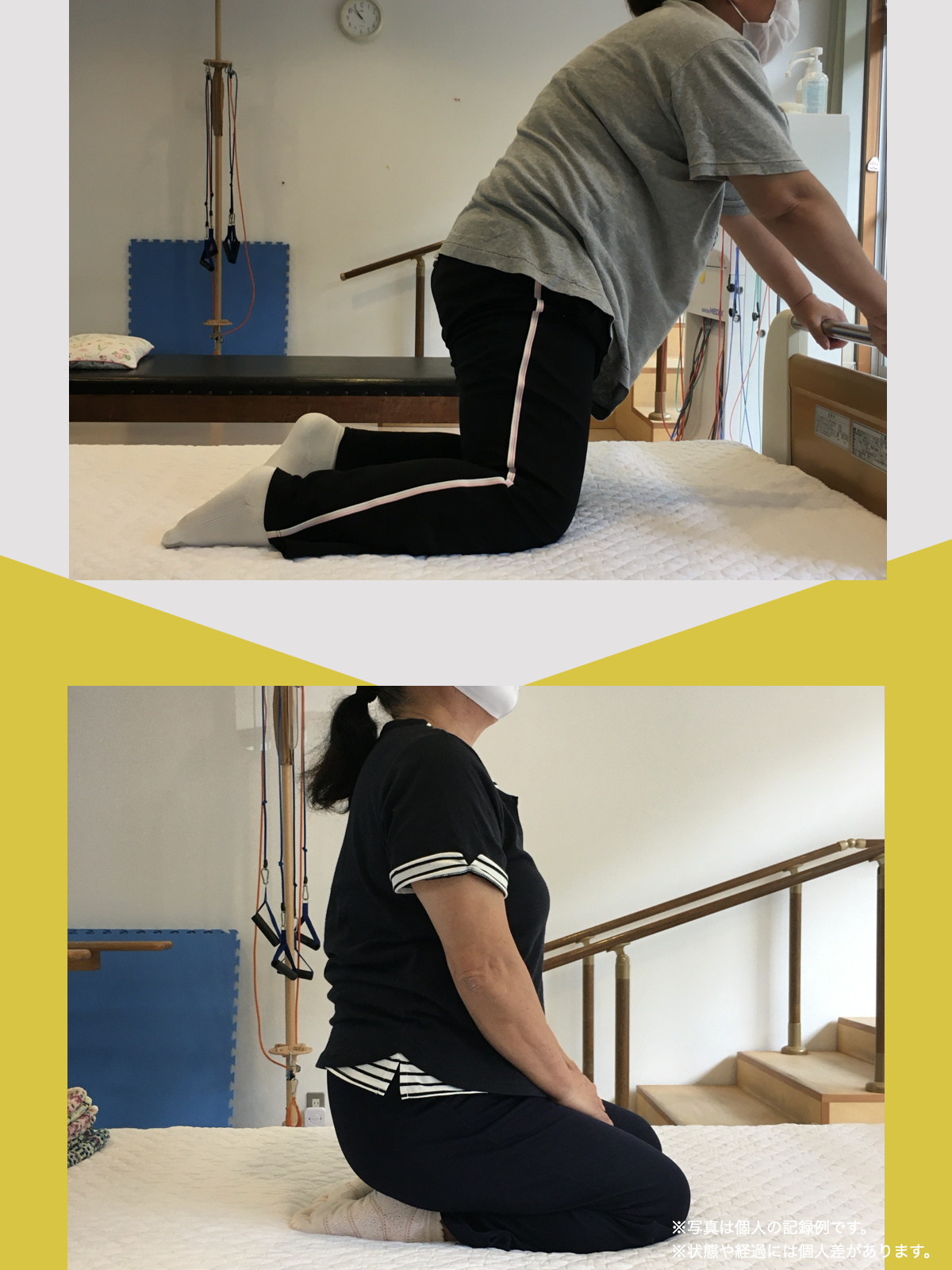
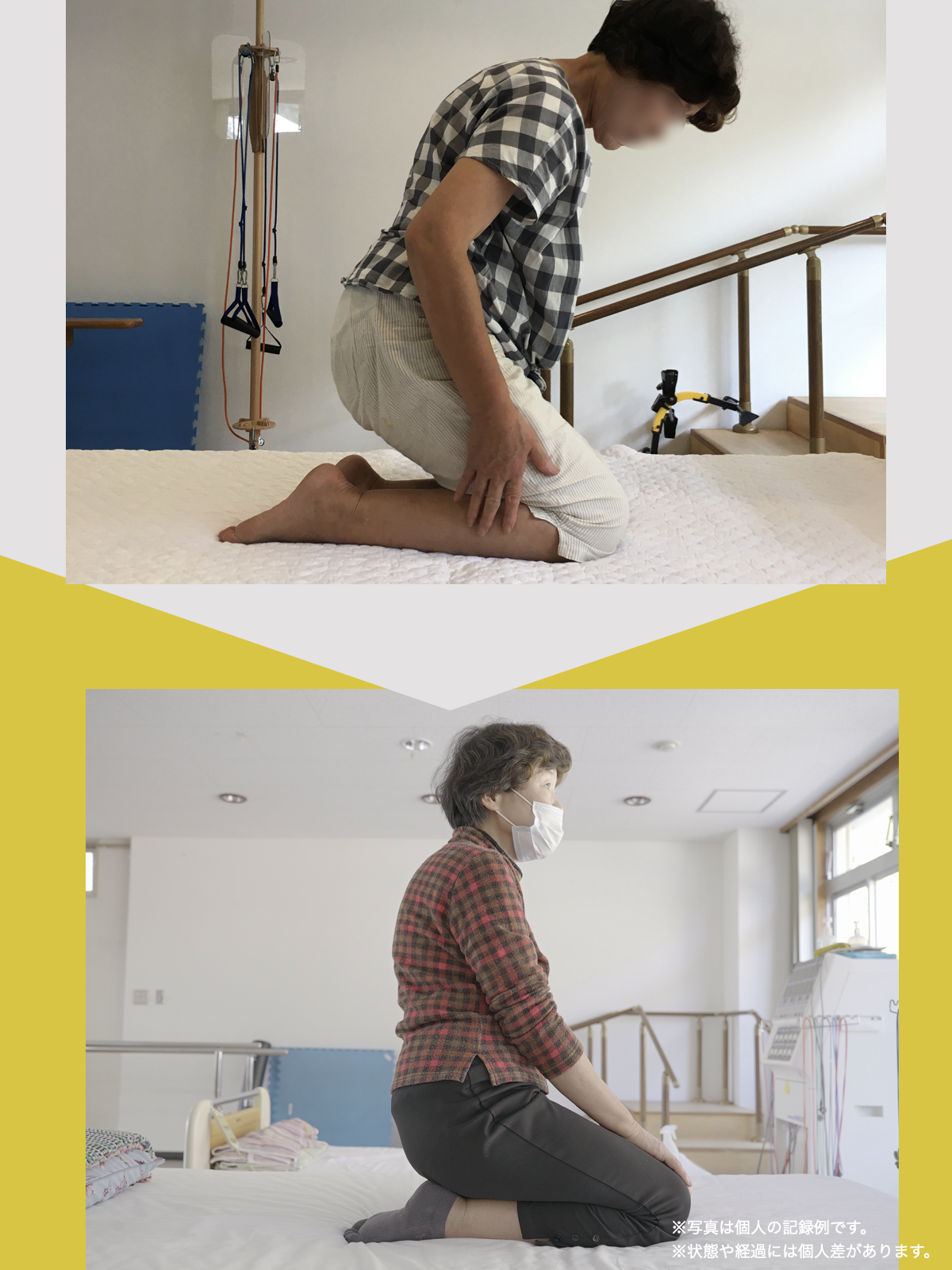
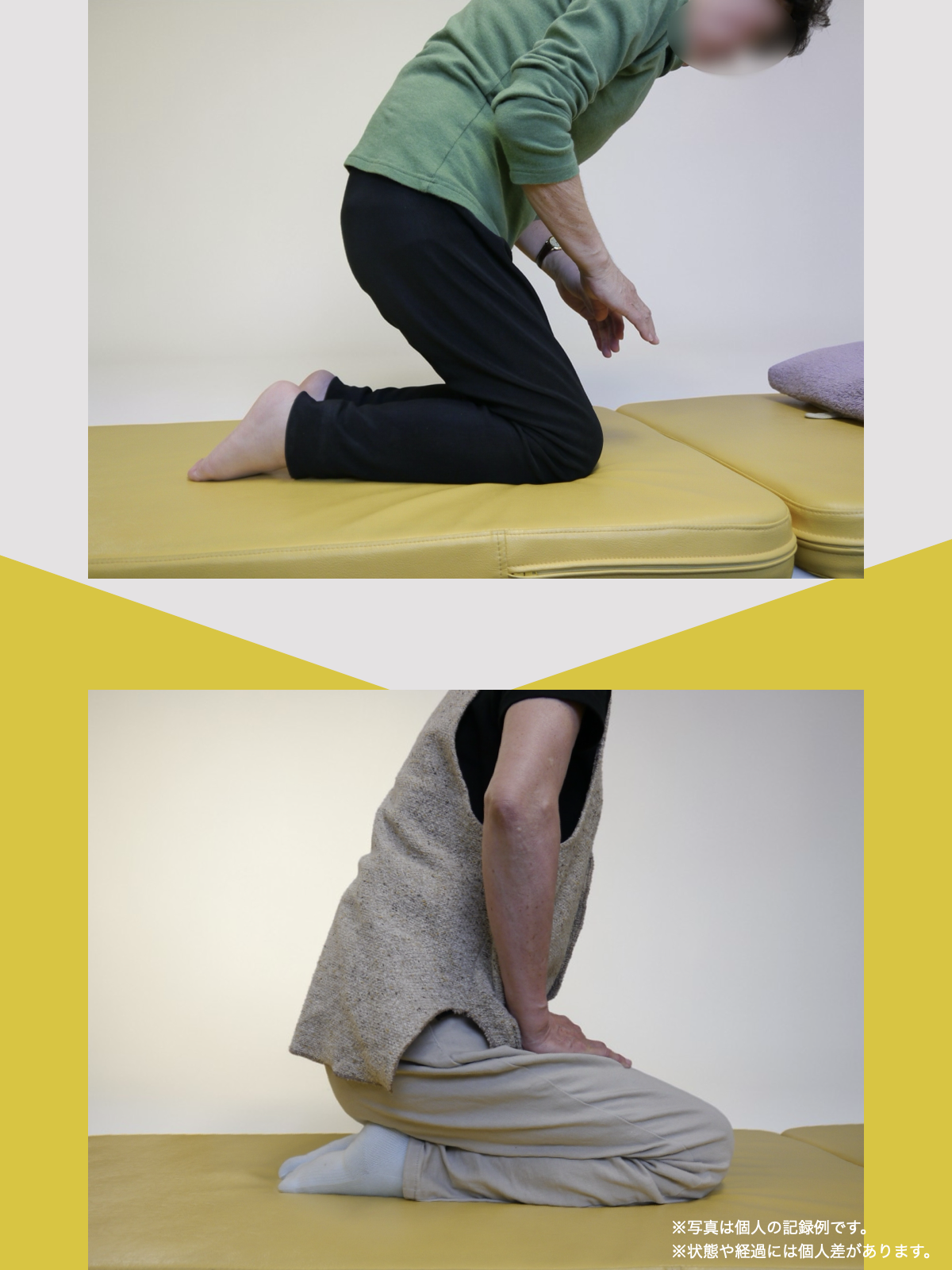
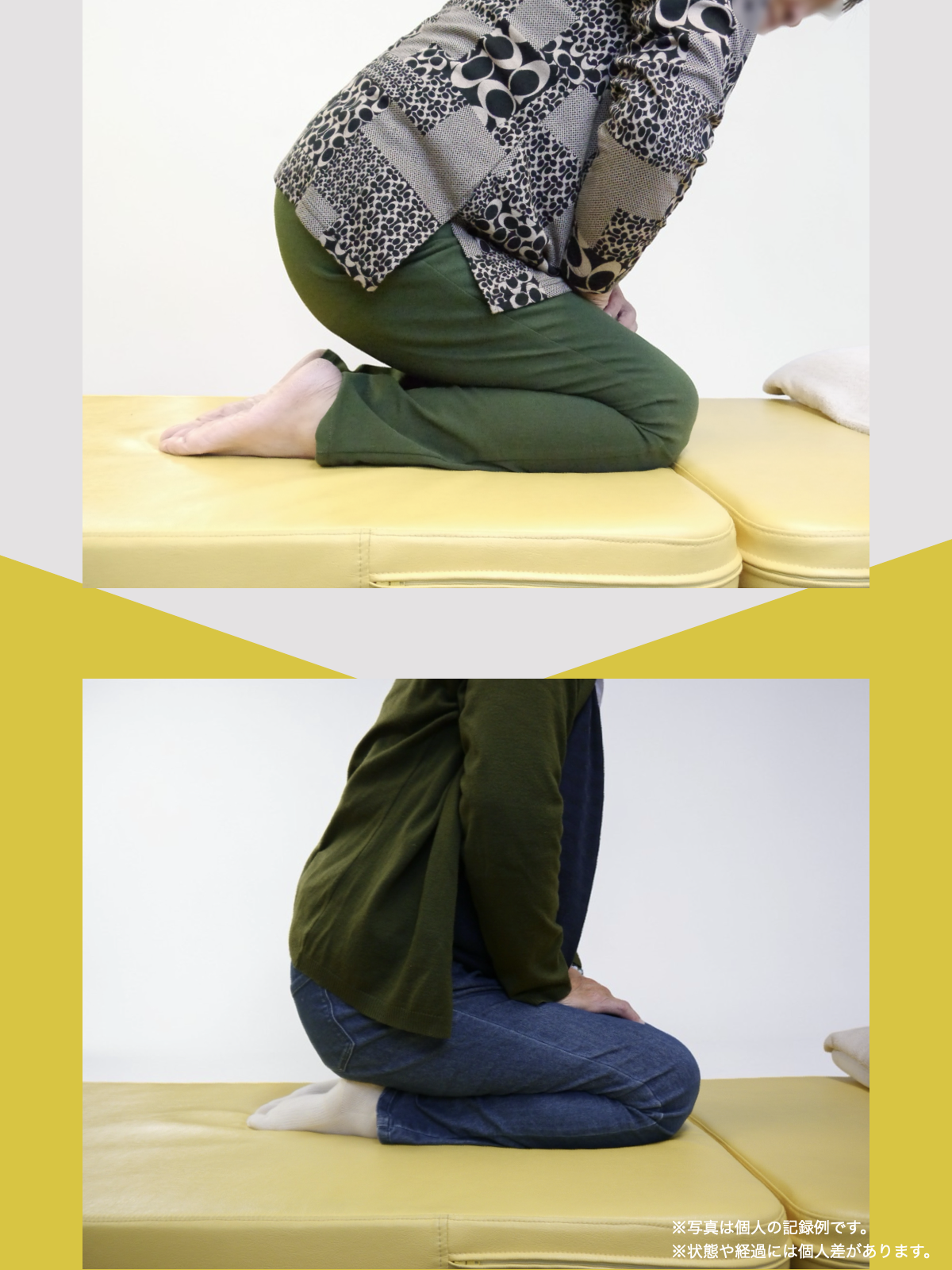
足指・姿勢の状態観察例
ひろのば体操やYOSHIRO SOCKSなど、足の環境を整える取り組みを日常生活の中で実践された方の足指や姿勢の状態を観察した一例です。
足指や姿勢の状態が変化する過程で、以前訴えていた痛みを意識しなくなったと話される方も臨床では少なくありません。
外反母趾

















内反小趾




屈み指




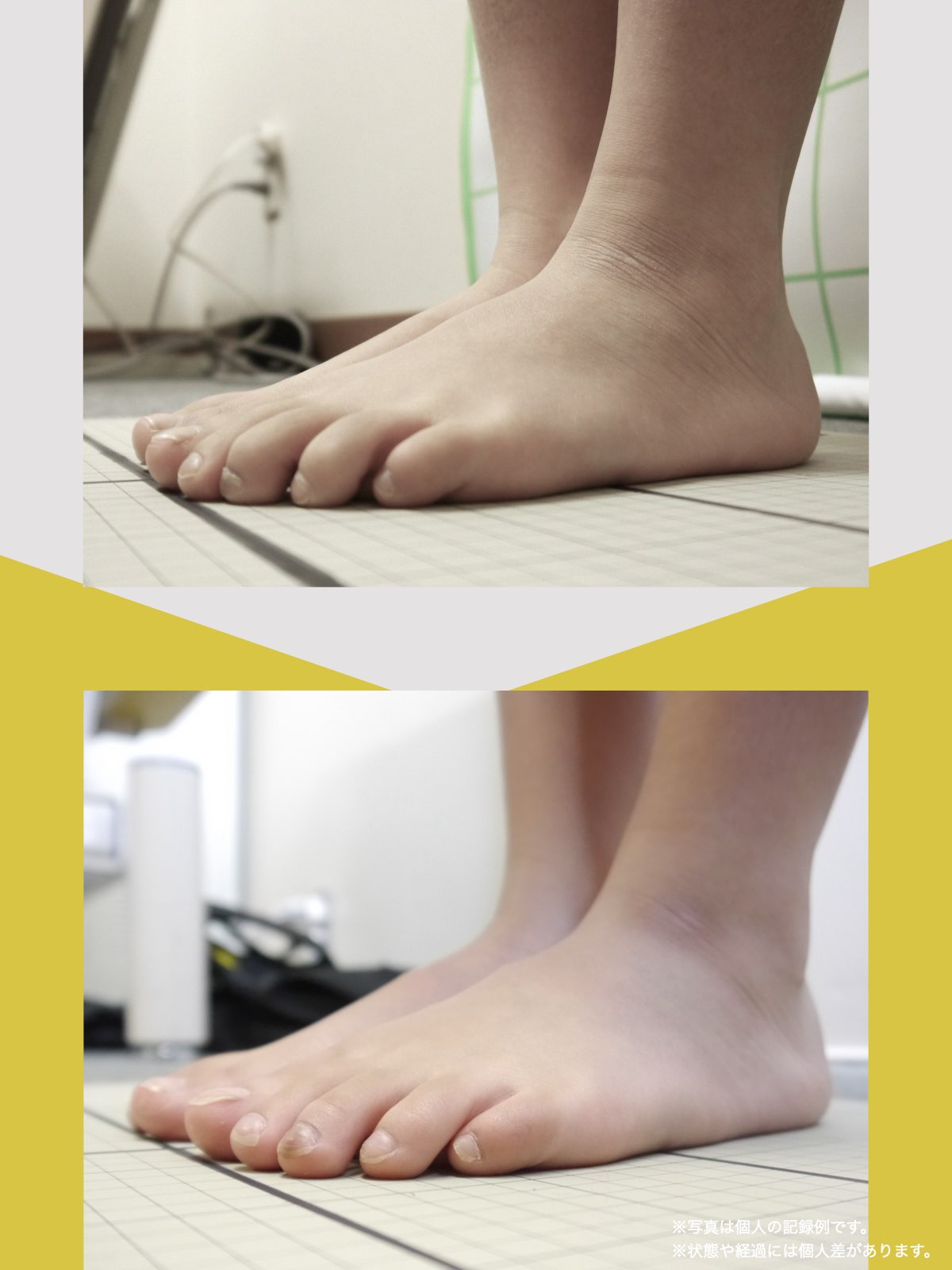




浮き指




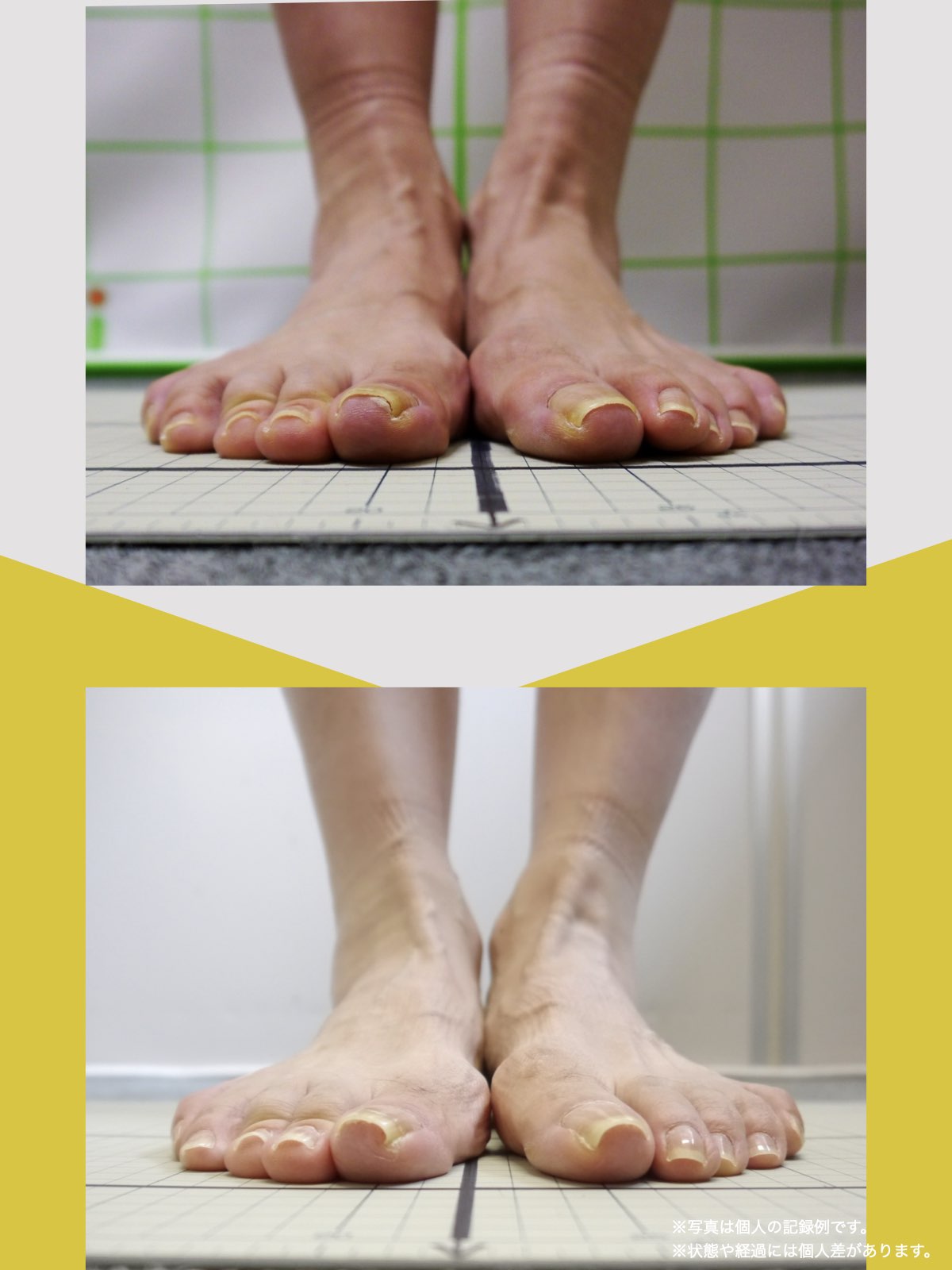












寝指








姿勢












正座






※これらは来院時に観察された足指や姿勢の状態の一例です。
※特定の症状の改善や治療効果を示すものではありません。
\ YOSHIRO SEMINAR /
なぜ足指が、姿勢や痛みに影響するのか。
\ NHK SAKIDORI /
もう一度自分の足で歩きたい。その結末とは…